CS231A:Computer Vision, From 3D Reconstruction to Recognition
https://www.bilibili.com/video/BV1LQ4y1r7ps/
L2. Camera Models
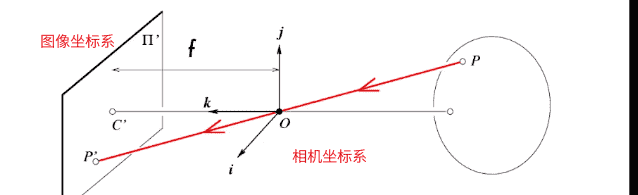
pinhole camera(小孔成像 - 摄像机)
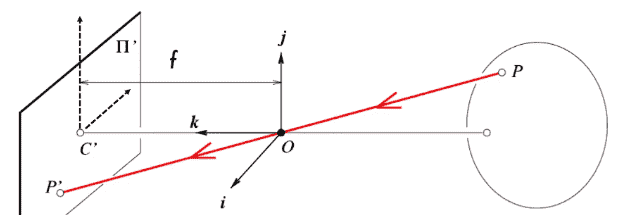
以O点(pinhole位置)建立坐标系,真实物体点P(x,y,z)投影到成像屏幕上P′(x′,y′),有如下关系(相似三角形)
x′=zfx,y′=zfy
物理课的小知识
- 小孔越小,透光越少,但是画面清晰
- 小孔越大,透光越多,但是画面模糊
因此为了全部都要,引入了Lens(透镜)
Lenses and Cameras(透镜和相机)
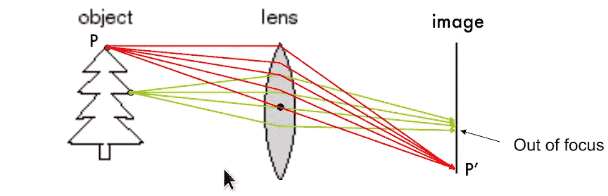
- 除了通过中心的光线,其他光线都会被折射
- 在一定距离,所有入射光线会被折射到图像的一点上
- 少于或多于这段距离,光无法聚焦在一个点上(Out of focus)
景深(Depth of Field)则是指在摄影或者摄像中,一张图像中能够保持清晰度的距离范围。
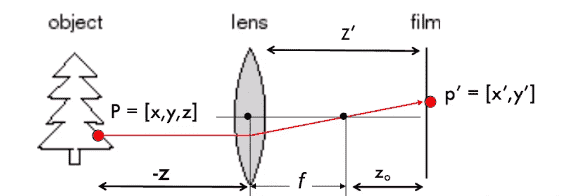
定义参数等效焦距z′=f+z0,z0为像距
则有:
x′=zz′x,y′=zz′y
但由于工艺问题,透镜成像的边缘经常发生distortion(畸变)
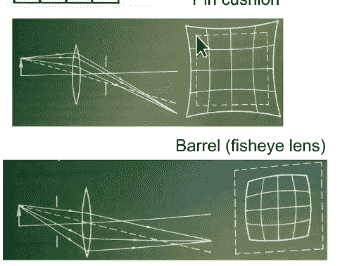
虚线为理想情况
- 图1:聚焦偏外,越角落越边缘的图像越偏外
- 图2:聚焦偏内,越角落越边缘的图像越偏内
The Geometry of Pinhole Cameras(几何)
只要距离足够,透镜和小孔成像都是同一个数学模型
p=⎣⎢⎡xyz⎦⎥⎤→p′=[x′y′]
我们完成了三维世界到二维平面的投影
Coordinate systems(坐标系)
- Off Set:(x,y,z)→(zfx+cx,zfy+cy)
- (cx,cy)的存在:相机由于工艺问题,无法保证焦点中心一定在图像中心,因此通过引入参数来进行矫正调整
- From Metric to Pixels:(x,y,z)→(kzfx+cx,lzfy+cy)
- 我们更偏向乘上系数,使得长度单位变成像素(不同的系数解决了像素是长方形的情况)
- 所以(cx,cy)也是像素单位
当z发生变化时,投影坐标并不是线性变化(倒数),不利于使用线代处理
同时乘上z,会丢失z的信息
因此引入Homogeneous Coordinates(齐次坐标)
Homogeneous Coordinates(齐次坐标)
(x,y)→⎣⎢⎡xy1⎦⎥⎤
我们对点坐标,额外增加一个新的维度(二维变三维,三维变四维)
所以我们需要知道如何从齐次坐标转化回真实坐标
⎣⎢⎡xyw⎦⎥⎤→(wx,wy)
在后续计算中,补充的1可能会变化,我们需要让它变回1,代表了真实值
(x,y,z)→(kzfx+cx,lzfy+cy)(x,y,z)→(αzx+cx,βzy+cy)
我们整理式子,先让变化只跟(x,y,z)有关,α,β事实上就是相机确定后的两个定值系数
⎣⎢⎡α000β0cxcy1000⎦⎥⎤⎣⎢⎢⎢⎡xyz1⎦⎥⎥⎥⎤=⎣⎢⎡αx+cxzβy+cyz⎦⎥⎤
我们通过变换矩阵M,把相机坐标系下的齐次坐标点Ph转化为了图像坐标系下的齐次坐标点Ph′,即:
Ph′=MPh
z的信息就能得到很好的保存
Camera Matrix K(相机内参)
M内的参数被相机内部确定,只由相机的内部参数组成,内部参数一般称为K
M=⎣⎢⎡α000β0cxcy1000⎦⎥⎤=K[I0]
但由于工艺问题,有时像素平面可能不是一个矩形,而是一个平行四边形,产生了旋转
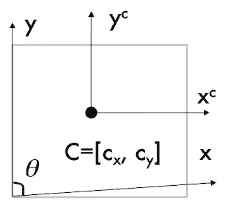
此时我们就需要考虑偏度(skewness)θ的影响
K=⎣⎢⎡α00−αcotθsinθβ0cxcy1⎦⎥⎤
懒得推导了
- α,β,θ,cx,cy共五个自由度
- 上三角矩阵
World Reference System(世界坐标系)
我们希望世界坐标系转化为相机坐标系,这里我们依旧使用齐次坐标
我们先处理二维平面的情况
-
平移Translation
-
缩放Scaling
-
注意是围绕原点进行缩放
-
当sx=sy时,称为相似变换
-
P′→⎣⎢⎡sxxsyy1⎦⎥⎤=⎣⎢⎡sx000sy0001⎦⎥⎤⎣⎢⎡xy1⎦⎥⎤
-
旋转Rotation
我们可以组合上述的矩阵:同时进行平移缩放旋转
即对P先后进行变换矩阵的左乘即可
对于三维情况:
-
平移Translation
-
缩放Scaling
-
旋转Rotation
-
绕x轴旋转α,绕y轴旋转β,绕z轴旋转γ
-
Rx(α)=⎣⎢⎡1000cosαsinα0−sinαcosα⎦⎥⎤Ry(β)=⎣⎢⎡cosβ0sinβ010−sinβ0cosβ⎦⎥⎤Rz(γ)=⎣⎢⎡cosγsinγ0−sinγcosγ0001⎦⎥⎤
-
任意绕轴旋转都可以进行分解成绕三轴先后旋转
-
R=Rx(α)Ry(β)Rz(γ),合成三个矩阵
-
P′→[R001]⎣⎢⎢⎢⎡xyz1⎦⎥⎥⎥⎤
在这里,我们一般不考虑缩放(刚体是不会缩放的)
组合旋转和平移
P′→[R0T1]
即可完成旋转后,再平移
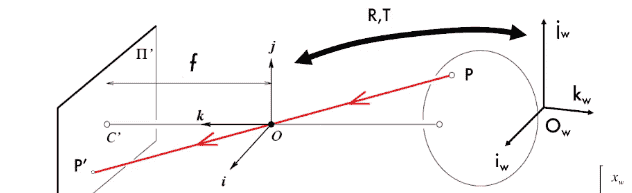
- 从世界坐标系,通过R,T转化到相机坐标系
- 从相机坐标系通过投影,转化为图像坐标系
推导从世界坐标系直接导入图像的公式:
P′=K[I0]P=K[I0][R0T1]PwP′=K[RT]Pw
其中[RT]被称为外参数
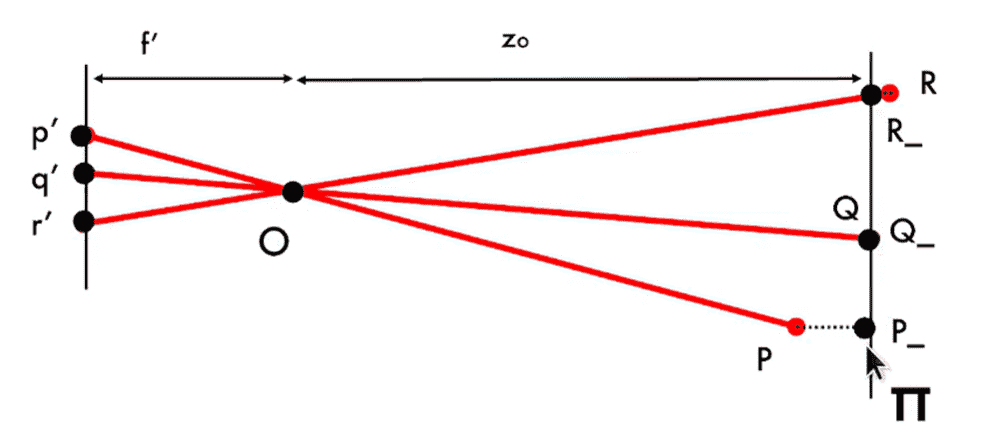
Weak Perspective Projection(弱透视投影)
当物体离相机足够远时,深度z其实可以近似为一个常数z0,从而简化计算
L8: Fitting and Matching
Fitting
Critical issues
- noisy data
- 数据中存在的随机误差或不确定性,测量、记录或传输过程中的各种因素引起
- 对整体趋势影响较小
- 处理噪声数据的方法包括平滑技术(如移动平均)、滤波方法、数据清洗等
- outliers
- 数据集中与其他观测值明显不同的值,测量错误、录入错误、实际现象的稀有事件
- 具有明显的偏离,可能对分析结果产生较大的影响
- missing data
Techniques
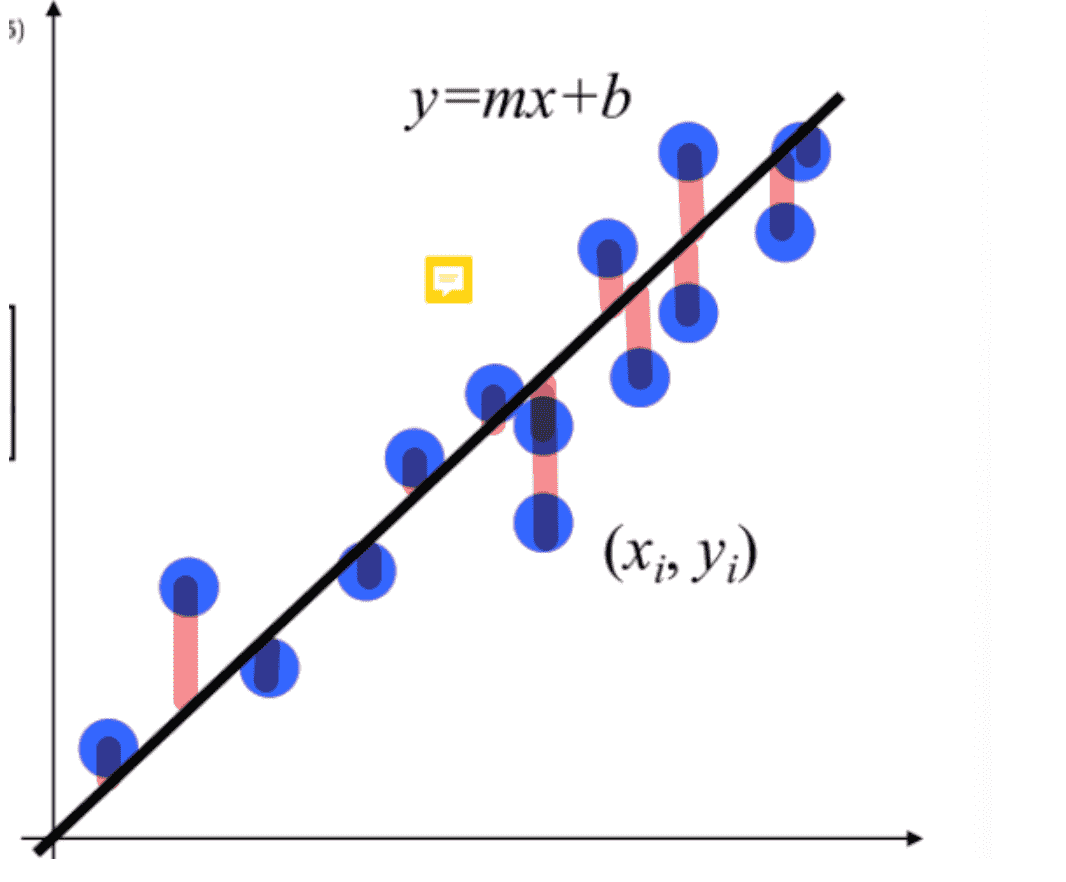
目标:拟合点集(xi,yi)
Least Square methods(最小二乘法)
- 直线模型:y−mx−b=0
- 找到(m,b)使得最小化误差E=∑(yi−mxi−b)2
E=∑(yi−[xi1][mb])2=∥∥∥∥∥∥∥⎣⎢⎡y1...yn⎦⎥⎤−⎣⎢⎡x1...xn111⎦⎥⎤[mb]∥∥∥∥∥∥∥2=∥Y−Xh∥2=(Y−Xh)T(Y−Xh)=YTY−2(Xh)TY+(Xh)TXh
对h求导
dhdE=−2XTY+2XTXh=0
解得:
h=(XTX)−1XTY
但是这样是代数意义上的最优解
考虑几何意义上的最优解:
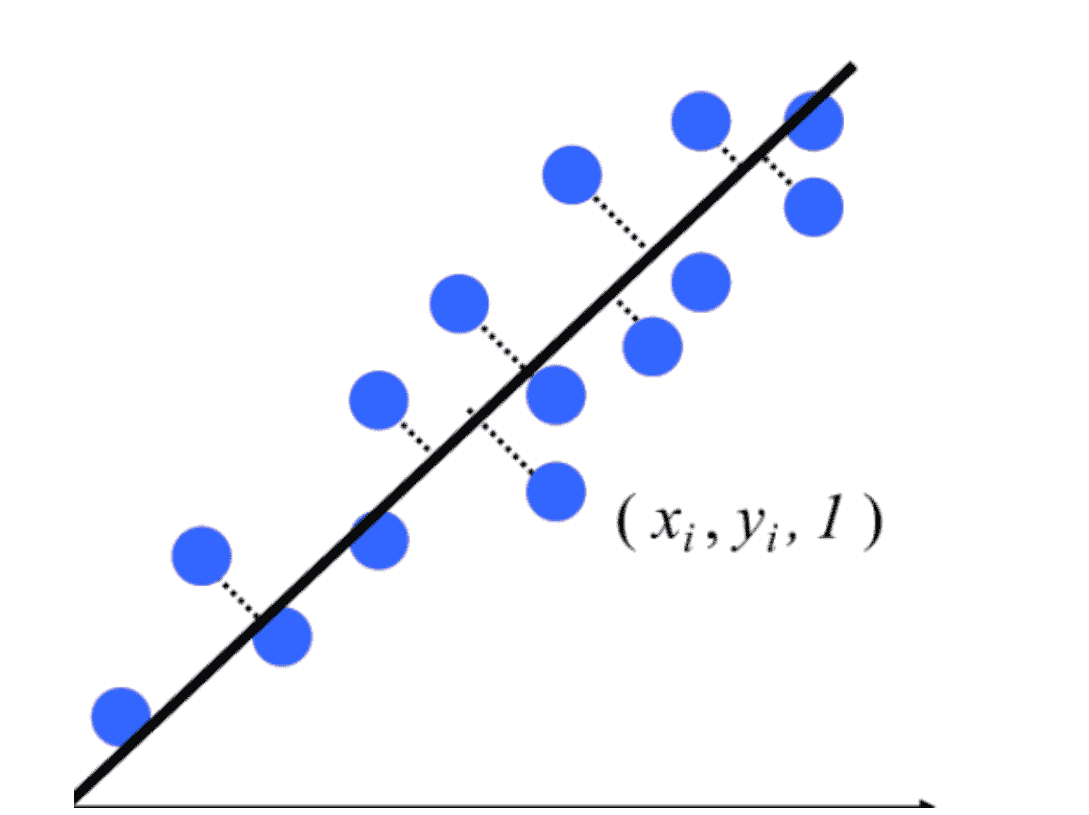
对于直线ax+by+d=0,点(x,y)到直线的距离定义为:
dis=a2+b2∣ax+by+d∣
我们可以a,b的存在表示了斜率,因此我们可以通过类似归一化的操作,使得a2+b2为1,或者为一个定值
因此我们事实上只需要关心∣ax+by+d∣,代表了相对大小,不需要具体的真实值
故定义:E=∑∣ax+by+d∣2
我们需要寻找最优的(a,b,d)
令矩阵A=⎣⎢⎢⎢⎡x1x2...xny1y2...yn11...1⎦⎥⎥⎥⎤,h=⎣⎢⎡abd⎦⎥⎤
则问题转化为:最小化 ∣∣Ah∣∣,并且限制∣∣h∣∣=1
使用SVD分解即可完成优化问题(留坑待填)
最后:
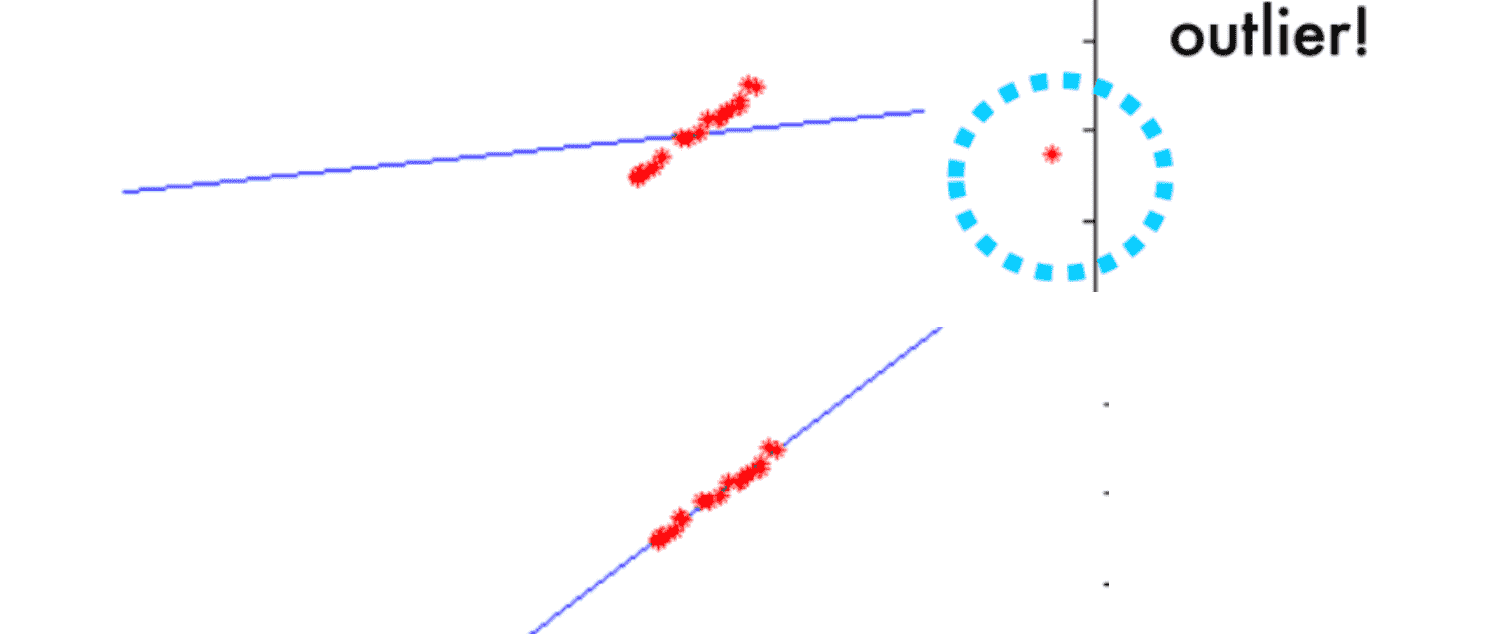
conclusion: Least Square is not robust w.r.t. outliers.
“w.r.t.” 是英文表达中的缩写,意思是 “with respect to”,翻译成中文是 “关于”、“针对”、“就…而言” 等等。
Least Squares: Robust Estimators (鲁棒估计器)
令残差μ=ax+by−d
定义鲁棒函数:
ρ(u;σ)=σ2+μ2μ2
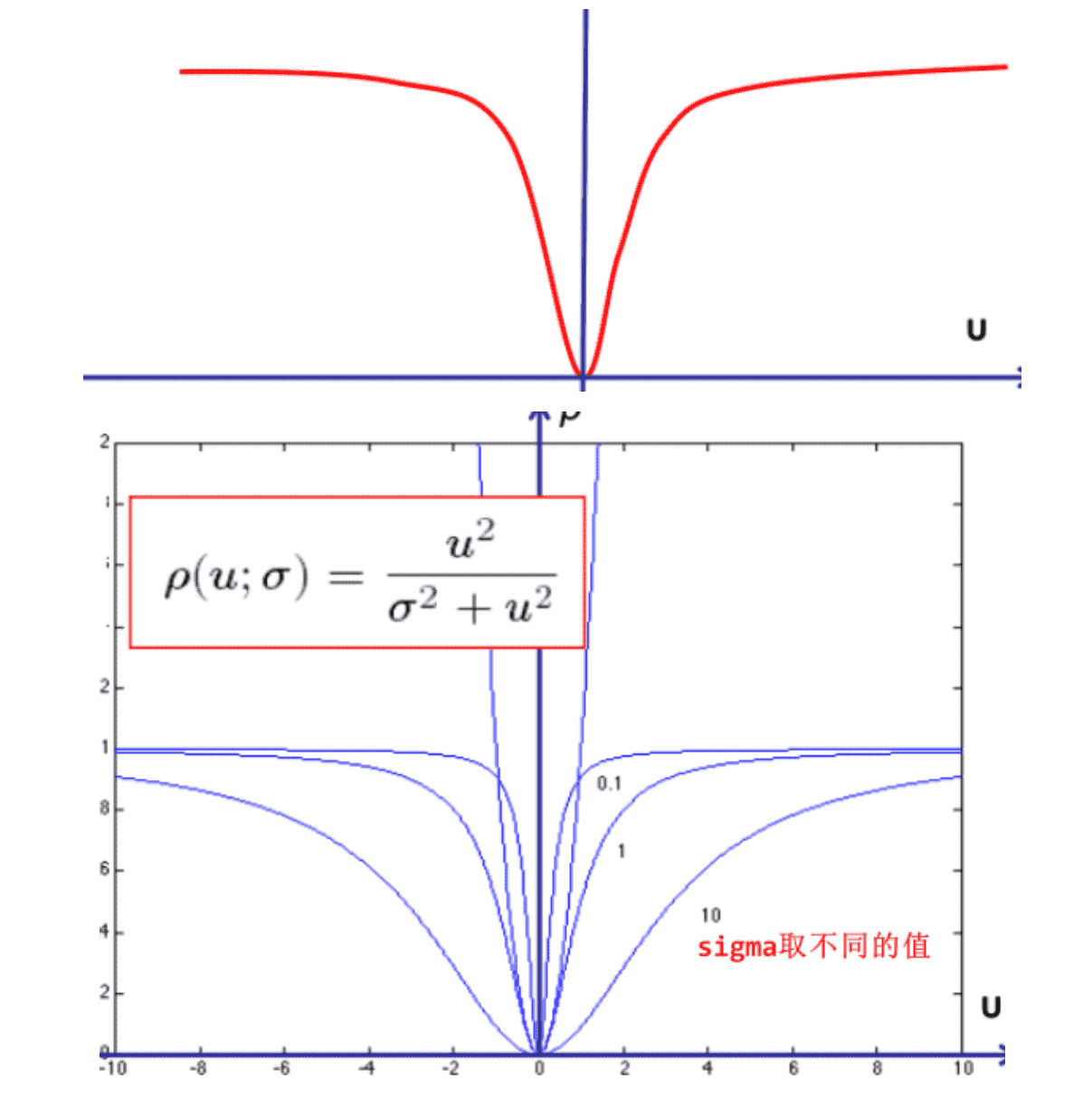
- μ越大,函数值接近1
- μ越小,函数是一个关于μ2的函数
较大的残差,原本会极大影响损失函数的值
通过此方法,我们限制了大残差的贡献,从而降低了对损失函数的影响,故能拟合的鲁棒性提升
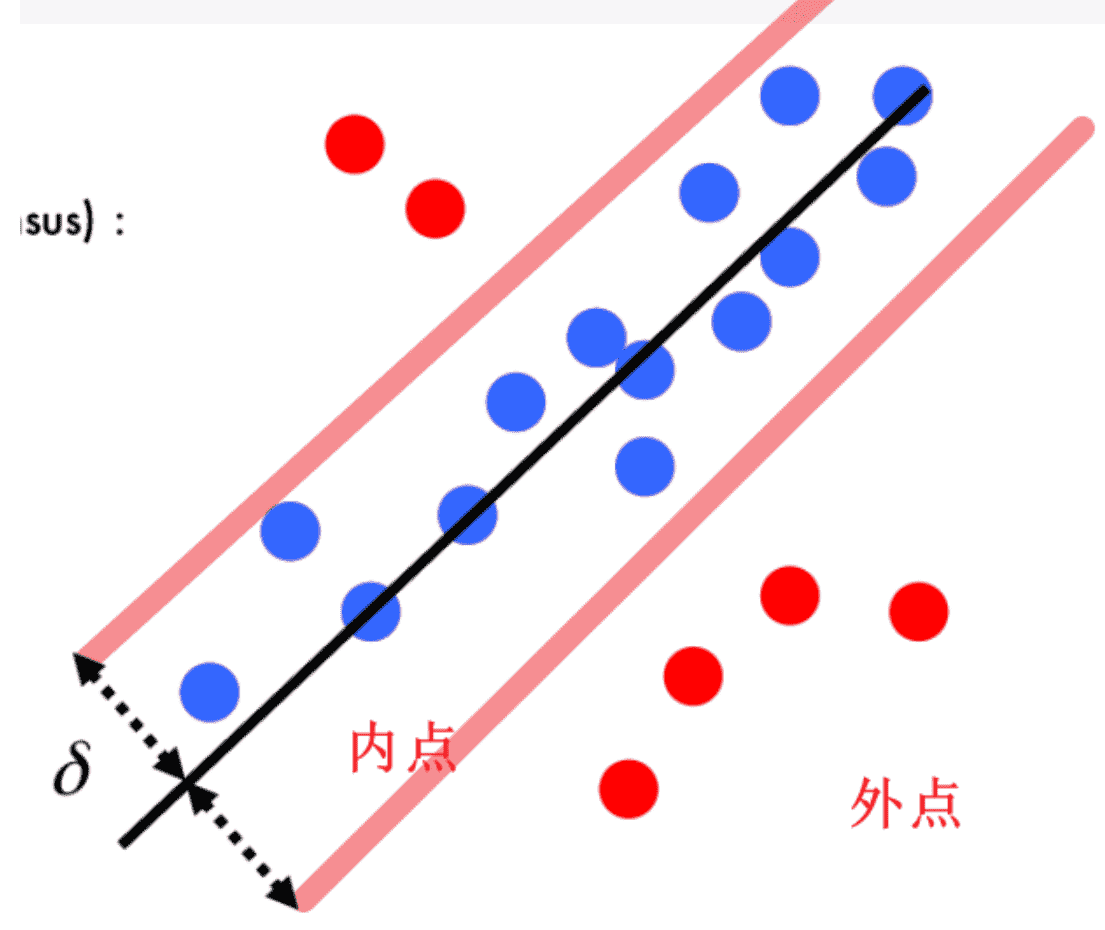
RANdom SAmple Consensus(RANSAC)
- 假设1:嘈杂的数据不会为任何单一模型投一致的票
- 假设2:有足够的数据点来商定一个好的模型
我们定义好阈值δ,与给定直线的距离在阈值范围内的点,被称为内点;否则是外点
算法流程
- 随机选择出需要确定模型的最小数量的点(例如:确定直线需要两个点,因此随机两个点)
- 对于随机选出的点,计算出模型
- 计算出内点和外点
重复多次,外点数量最小的模型即为我们需要的
因此我们比较好奇重复多少次可以基本保证能找到最优解
设重复次数为N,算法成功概率为p(一般取0.99),e表示内点数量与点数之比,s表示采样点的数量
则不成功的概率为:
1−p=(1−es)N
则有:
N=log(1−es)log(1−p)
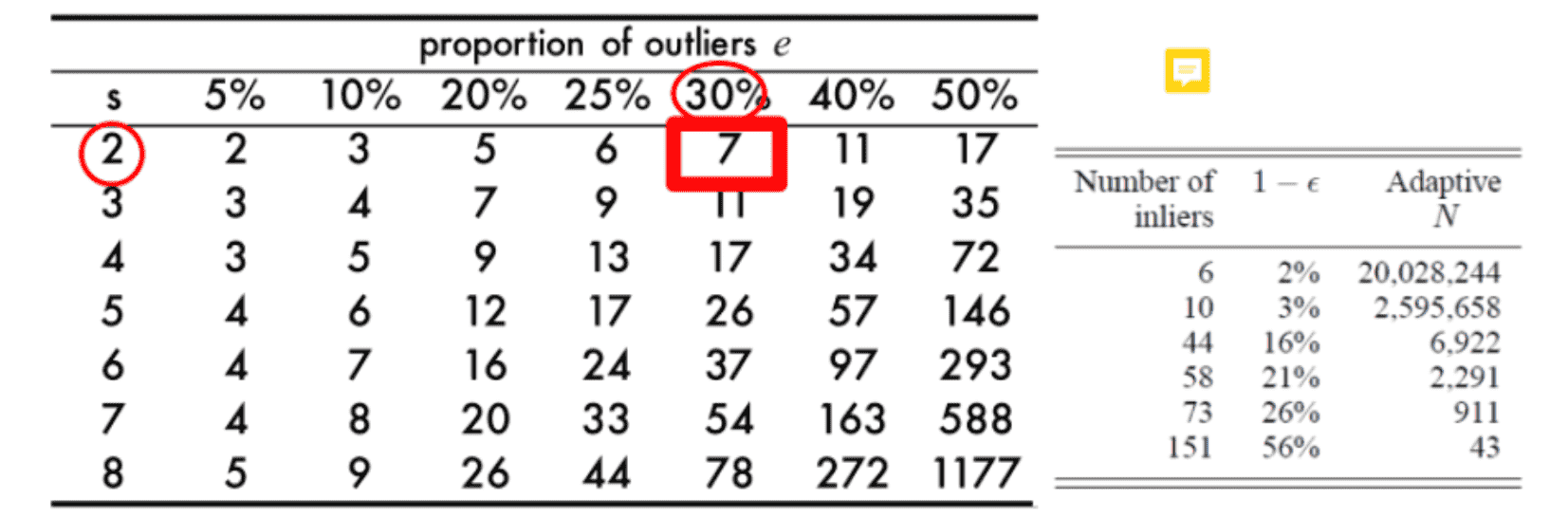
不管是需要采样的点变多,还是内点比例下降,都会使得次数增加
conclusion: Cannot be used if ratio inliers is too small
但对于大部分场景,外点是占较大部分的,因此很难使用
Hough transform(霍夫变换)
设一条直线:y=mx+n,其中(xi,yi)是该直线上一点
我们考虑将m,n看作自变量与因变量:n=−xim−yi
因此我们得到了
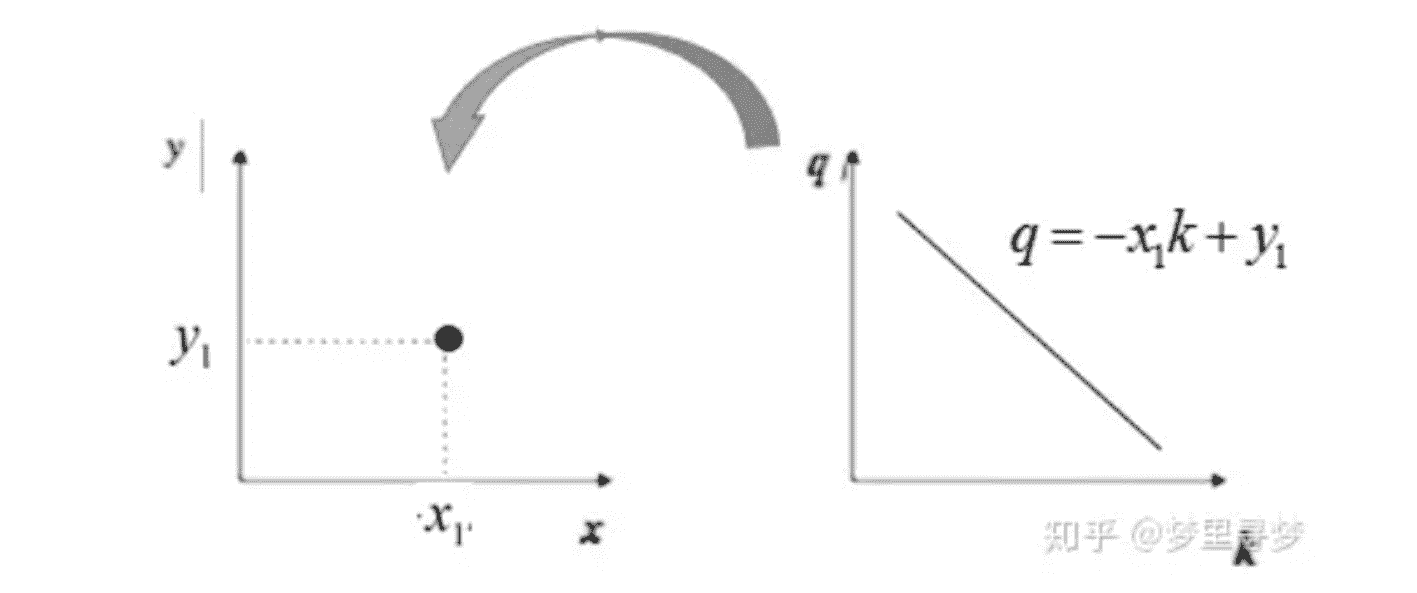
经过霍夫变换后得到的被称为是霍夫空间
笛卡尔坐标系中的一个点,对应霍夫空间中的一条直线
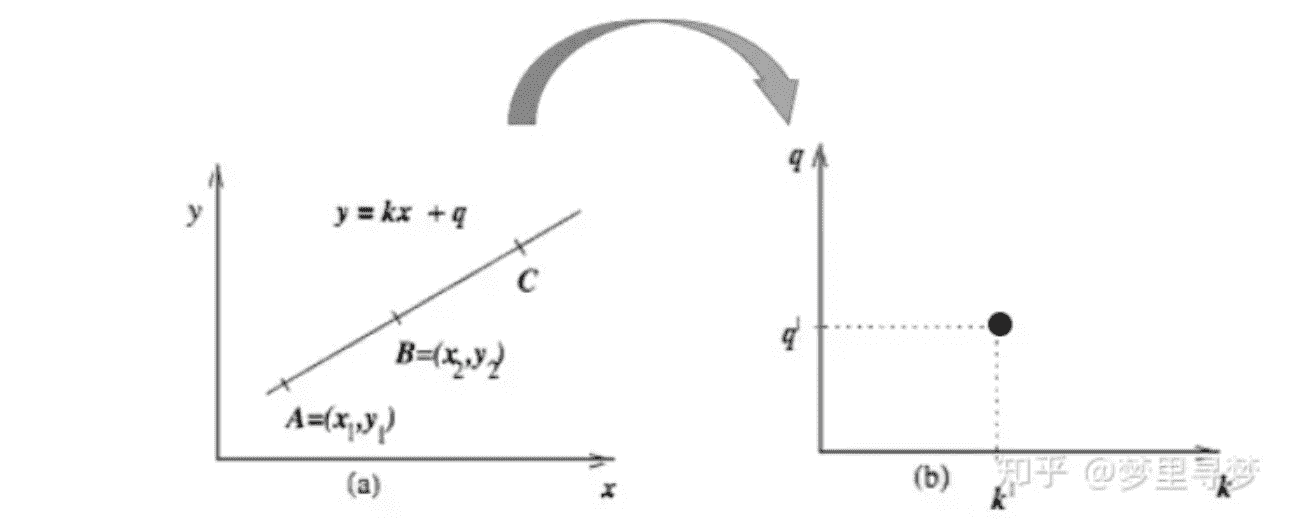
同理,笛卡尔坐标系中的一条直线,对应霍夫空间中的一个点
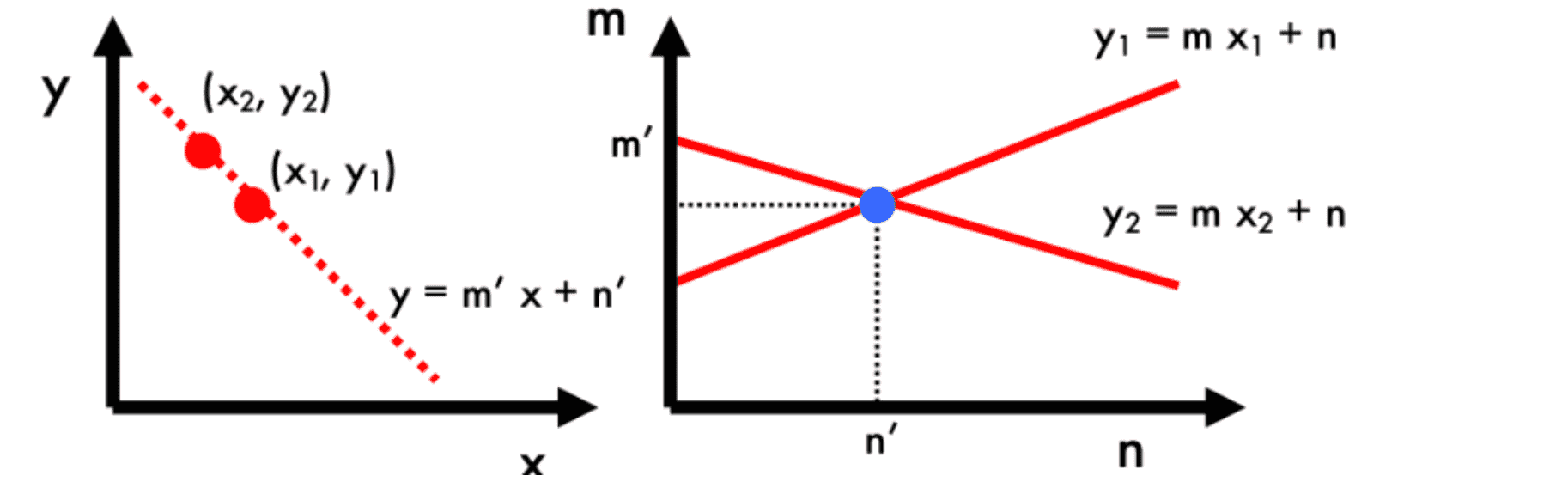
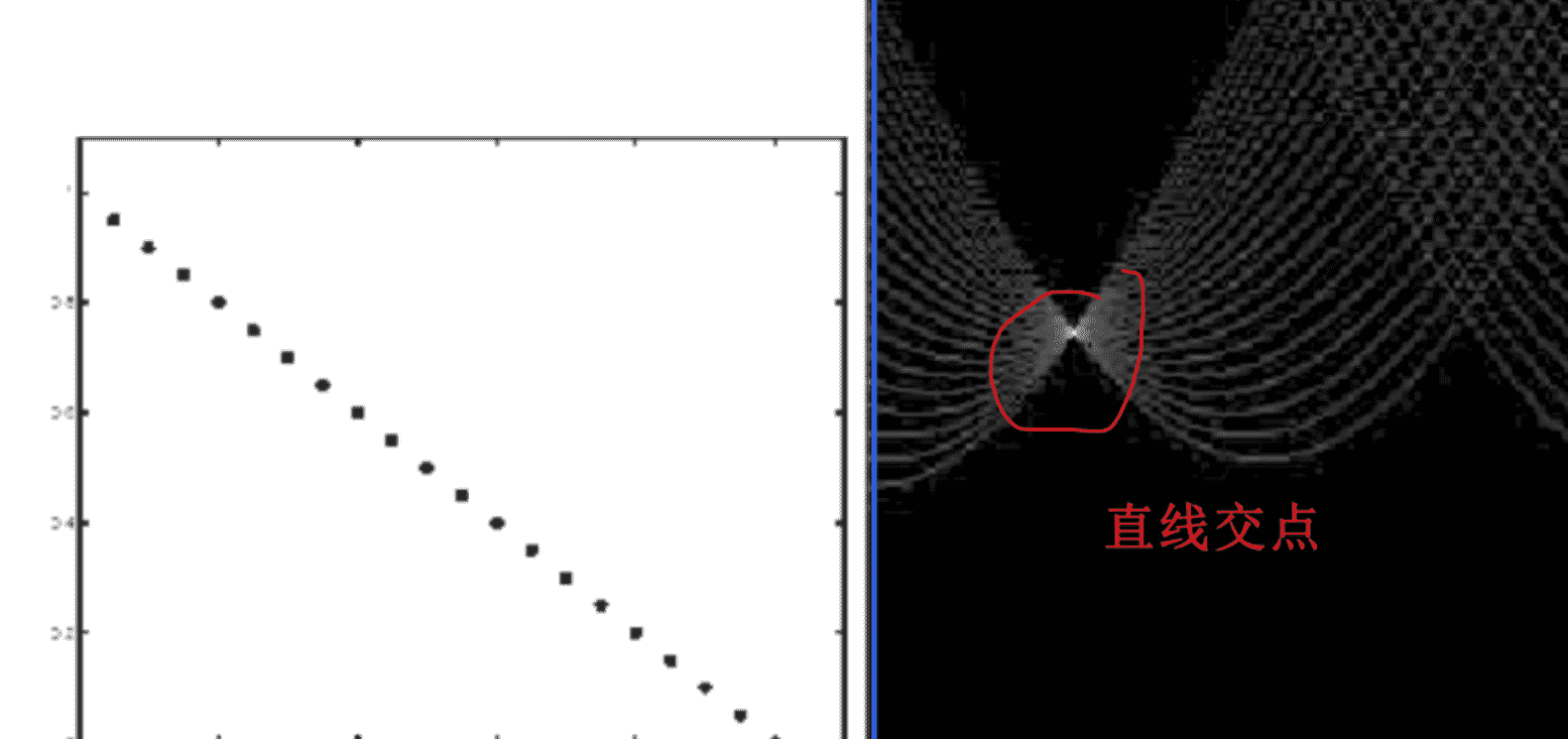
因此在笛卡尔坐标系中,同一直线上的点,其在霍夫空间中将交于同一点
理论上我们只需要知道哪些点被投票得最多,这条直线就是我们需要的
但问题还很多:我们无法表示垂直的线
考虑切换为极坐标系
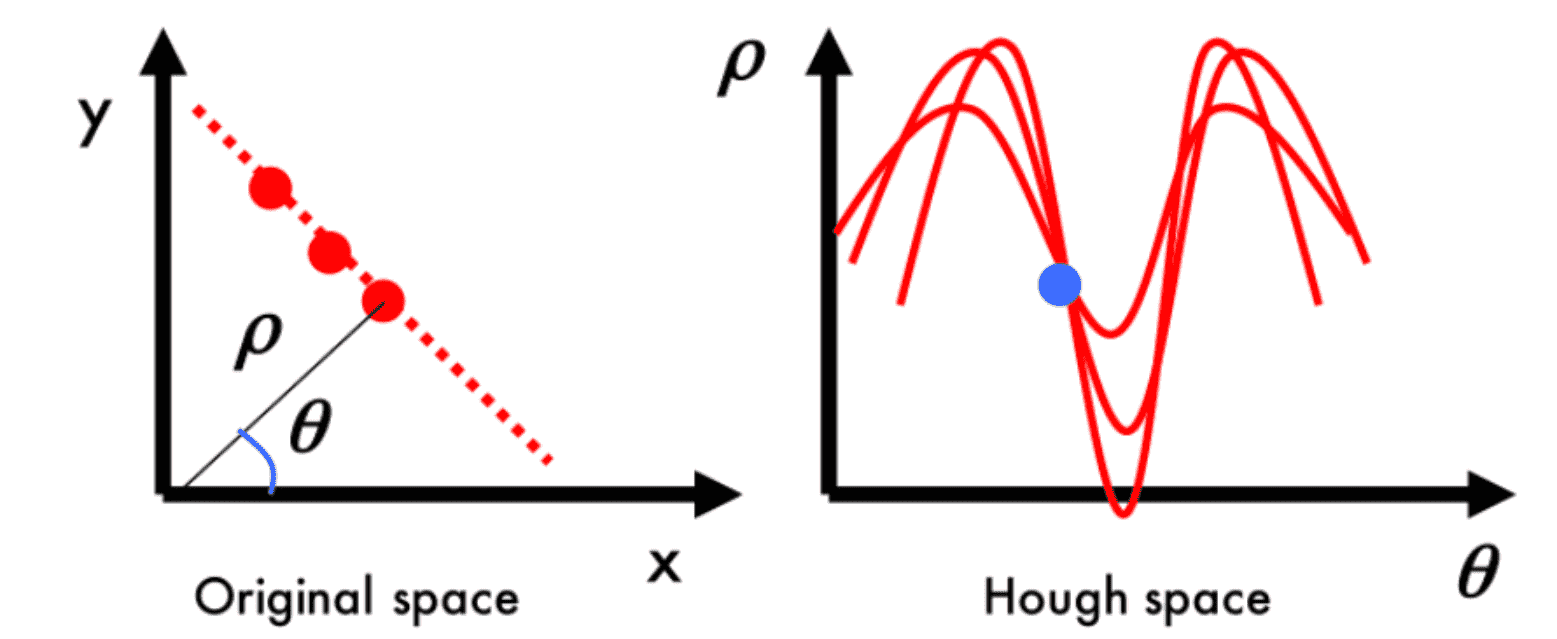
直线方程:
xcosθ+ysinθ=ρ
我们将霍夫空间看作一个网格
其中高度为原图像对角线长度(ρ的最大值),宽度为θ的最大值2π
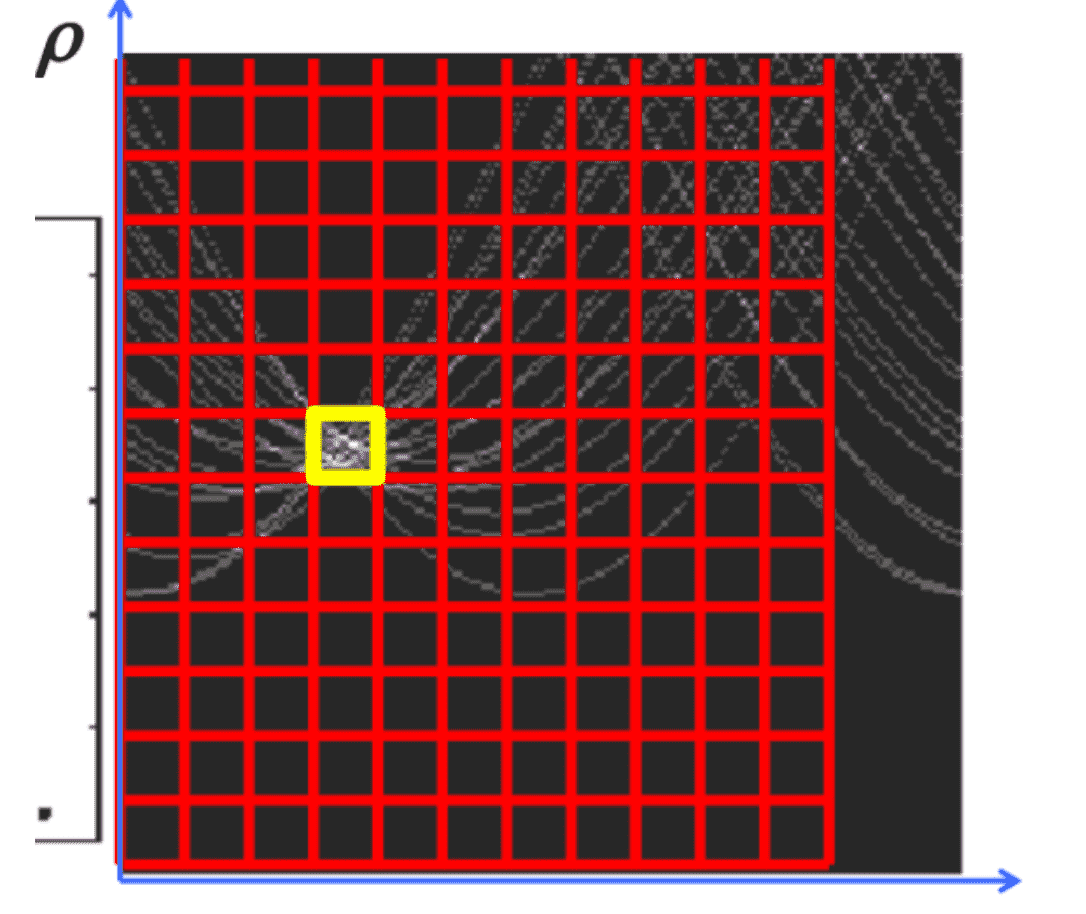
枚举网格点,估计一下其中的交点数量
对于高维数据非常难以处理
L9. Detectors and descriptors
Detectors
Edge detectors
Edge产生的要素
- 深度不连续性
- 表面方向不连续性(物体表面不同部分的朝向或法线方向发生突然变化)
- 反射率不连续性(即,表面材料性质的变化、颜色)
- 光照不连续性(例如,高光; 阴影)
边缘检测的例子

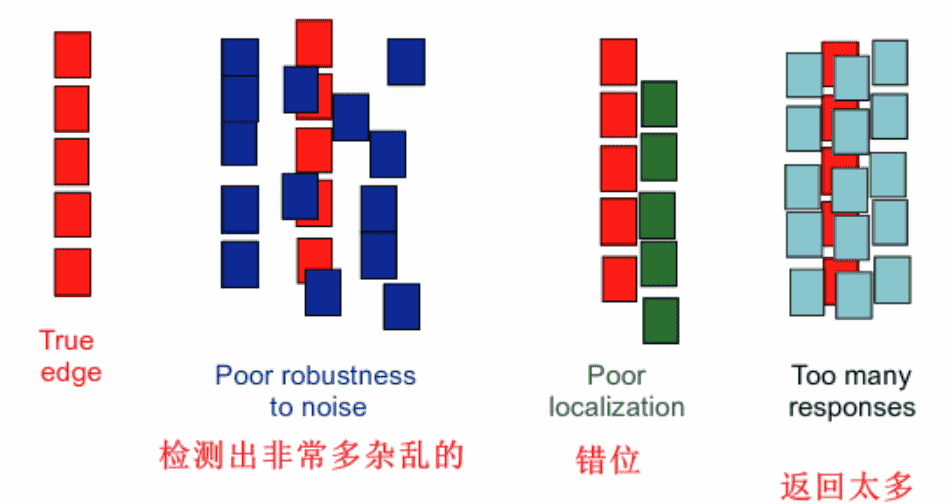
检测标准
- Good detection accuracy:不误检测噪声,漏检测真实边缘
- Good localization:检测边缘应该尽可能接近真实边缘
- Single response constraint:单一的回应
Detectors的设计
- 使用导数,定义了梯度较高(也就是变化较为激烈)的地方
- 对图像进行了平滑处理,提取导数之前减少噪音
在图像中,我们定义导数:
dxdf=fx−fx−1
因为是离散的,所以单位长度是一个像素,我们对一个像素作一个差值就是变化率,即导数
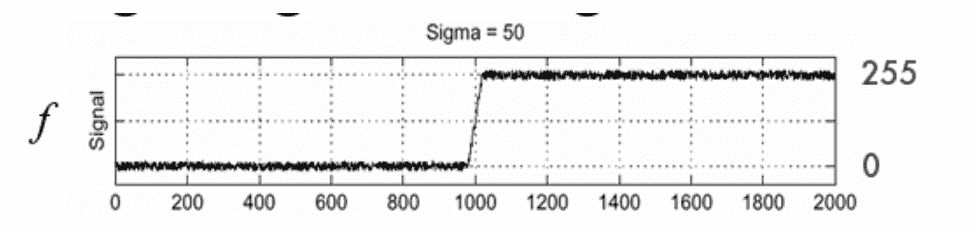
考虑如上的一个图像,我们若直接求出导数图像,你会发现并没有特别显著的大导数
原因是本身图像的波动大概就是5左右,而上升部分的差值也差不多是5
所以你会发现导数基本都一样
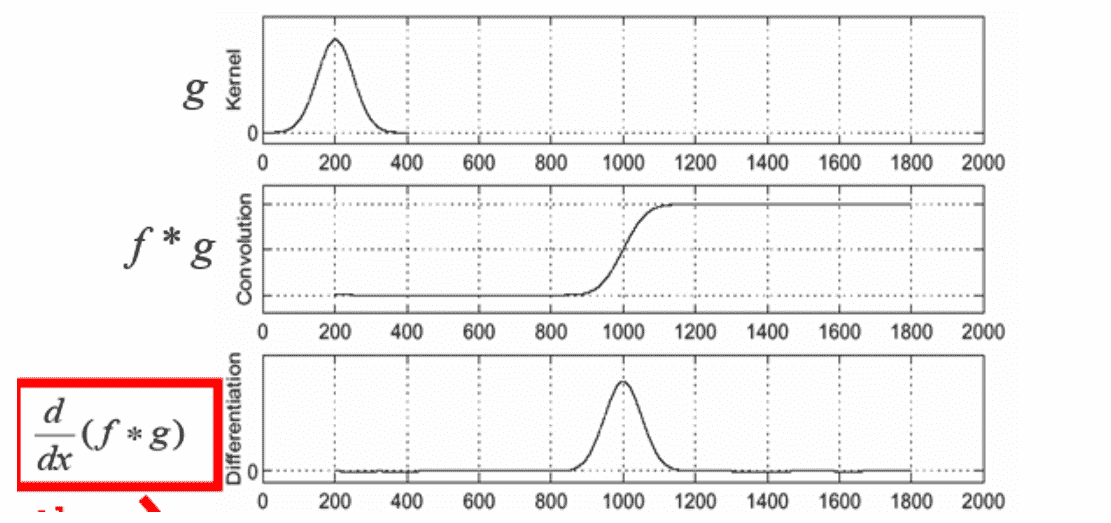
因此我们使用高斯模糊的卷积核进行平滑处理
消除了大量的波动,因此边缘部分得到了突出
S=▽(g∗I)=(▽g)∗I=[∂x∂g∂y∂g]∗I=[gx∗Igy∗I]=[SxSy]
Corner/blob detectors
- 可重复性:尽管存在几何和光度变换,但同一特征可以在多幅图像中被找到。
- 显著性:每个特征都位于图像的“有趣”区域。(反正基本不是空白区域)
- 局部性:一个特征占据图像的“相对较小”区域。
Harris corner detector
在窗口位置变化时探索窗口内的强度变化
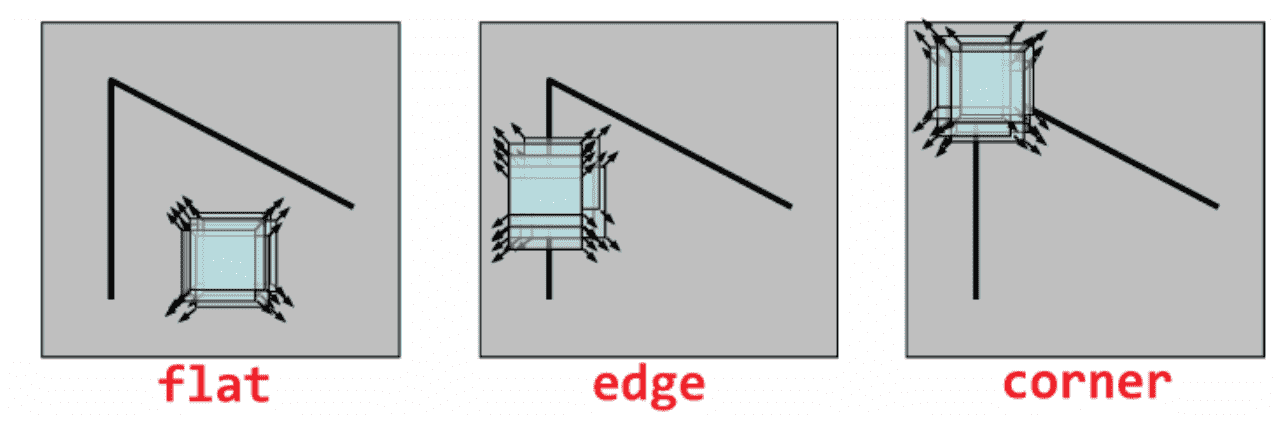
- flat:在所有方向上都没有变化
- edge:沿着边缘方向没有变化
- corner:在所有方向上都有显著变化
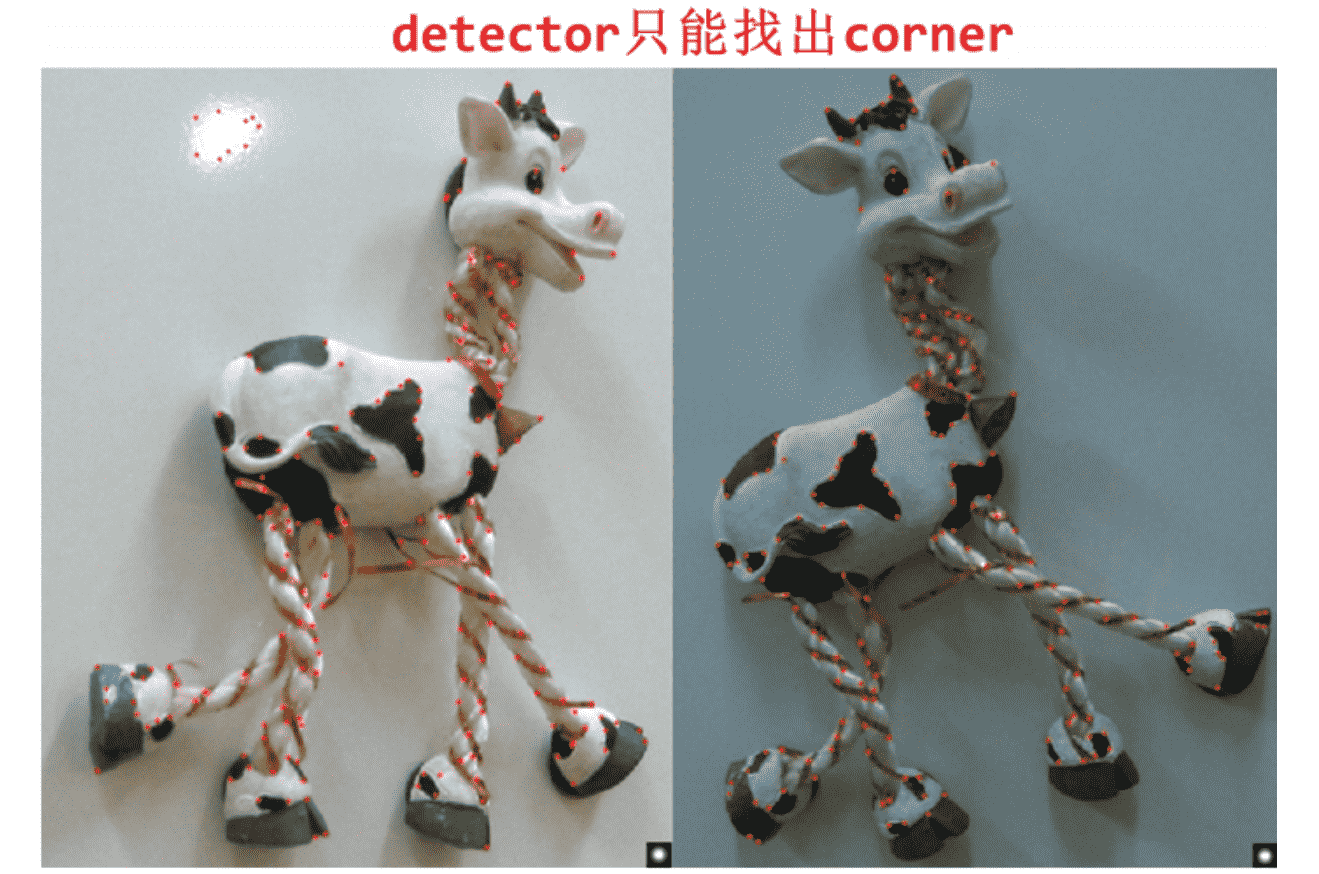
我们无法知道corner的尺度变化
Blob detection
回到边缘探测,我们可以把卷积后的结果的导数
修改为二阶导
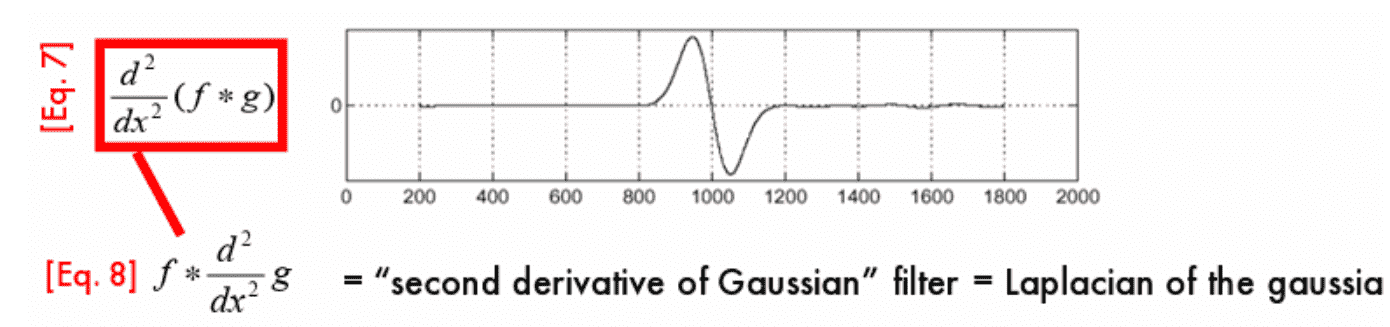
因此我们的高斯算子可以换成拉普拉斯算子(高斯的导数)

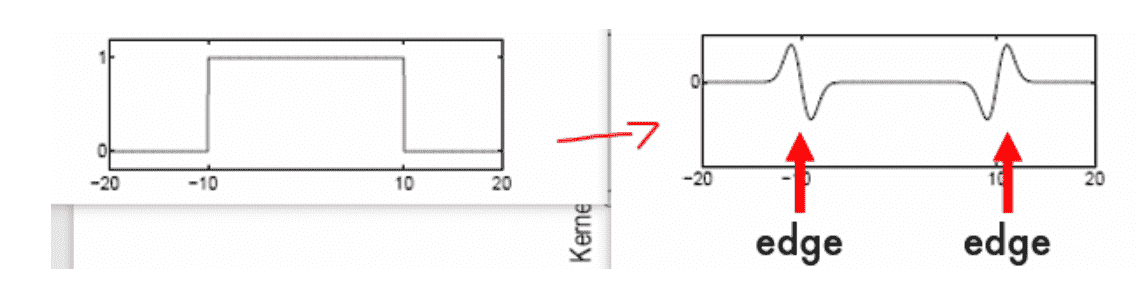
对原图像使用拉普拉斯算子进行处理即可
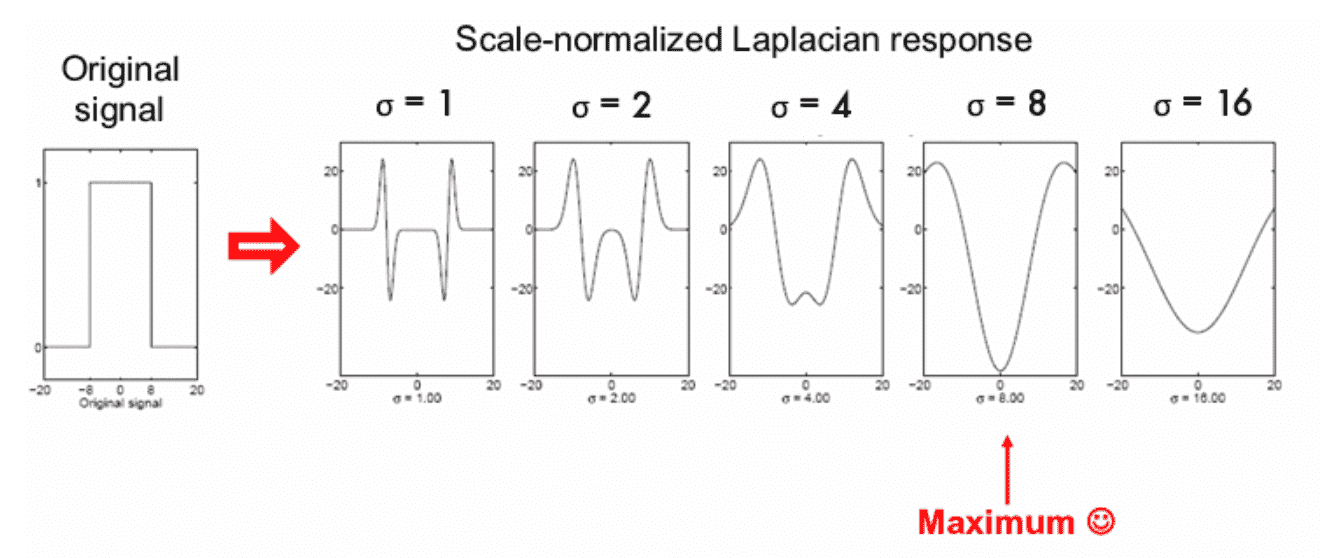
因此对于一个比较宽的图形,两侧边缘会分别导出两个波动
我们先尝试固定拉普拉斯算子,当图形宽度变化时
某种情况下,两个波动会融合在一起,并且幅度最大值取在了图形中央
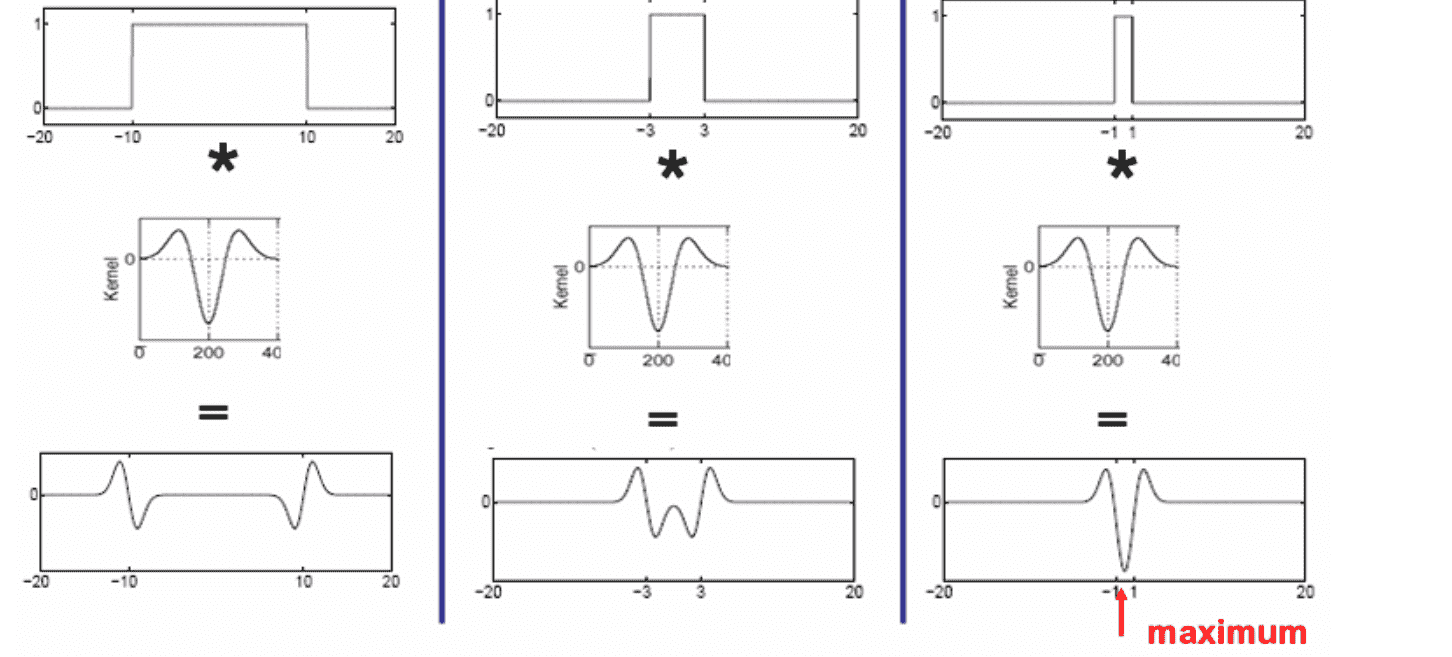
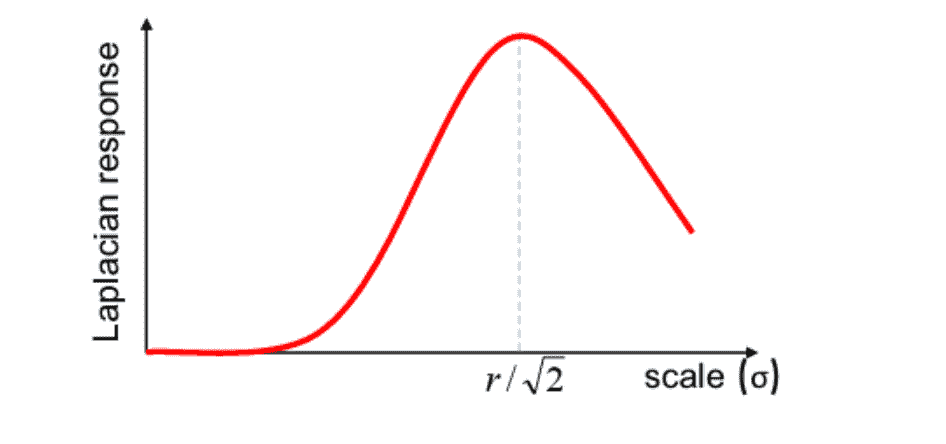
所以我们调一下参数,就可以找到幅度最大的点,从而估计出尺度大小
并且对于半径为r的圆,取到最大值的参数是可以计算的
DoG
高斯差分,你只需知道这个算子会更常用一点
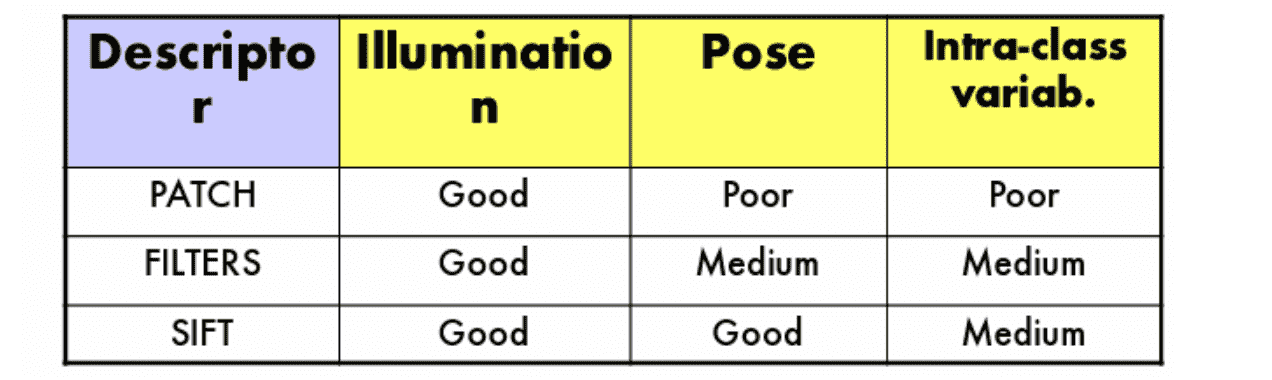
Descriptors
描述信息一般需要:
特征保证
- 光照不变性(Invariant w.r.t Illumination):特征应该不受光照变化的影响。
- 姿势不变性(Invariant w.r.t Pose):特征应该不受物体姿势变化的影响。
- 尺度不变性(Invariant w.r.t Scale):特征应该不受尺度变化的影响。
- 类内变异不变性(Invariant w.r.t Intraclass variability):特征应该能够在相同类别的不同实例之间保持稳定性。
特征要有
- 高度独特性(Highly distinctive):特征应该具有足够的独特性,以便在大型特征数据库中能够以高概率找到其正确匹配的特征。
Simplest Descriptor - Patch
图像中的一个小区域或局部区域,通常由一组相邻像素组成
将特征周围的像素n×m的小图片展开为[1,nm]大小的一维向量w
对w的强度进行归一化
w=∣∣w−wˉ∣∣w−wˉ
减去均值除以模长
无论图像的光照条件如何变化,这种归一化保证了描述符的生成不会受到影响,从而增强了描述符的稳定性和可靠性
缺点
- 对于位置、姿势、尺度和类内变异的小变化敏感
- 特征区分度较差
Filter
提供卷积核做点事情,然后提取特征
只能说鲁棒性有所提升
SIFT
大致理解即可,并不准确
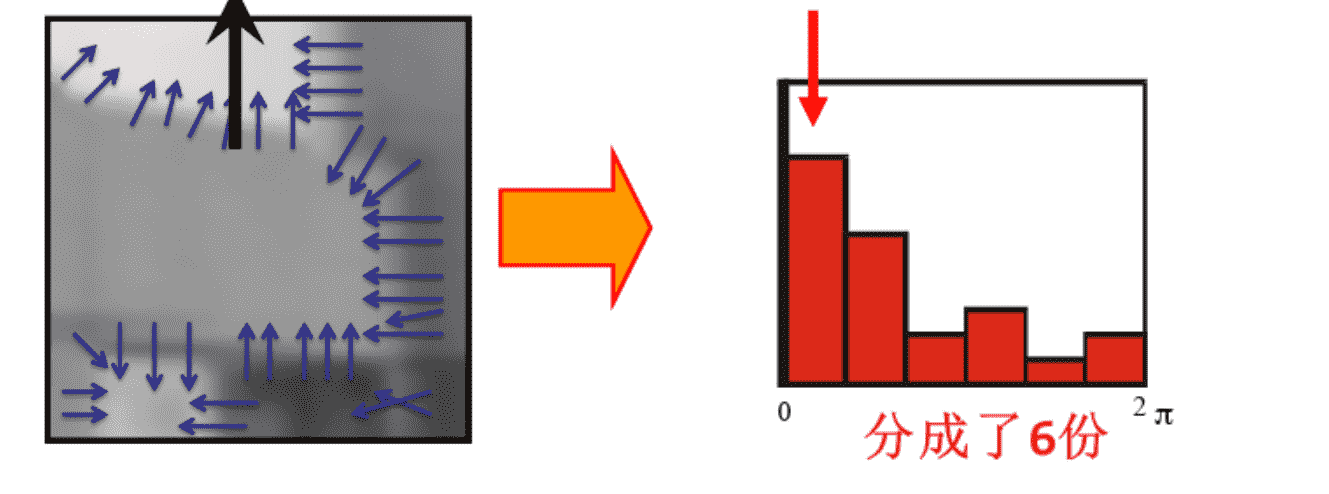
对于一个N×N的窗口,我们对每个像素计算梯度
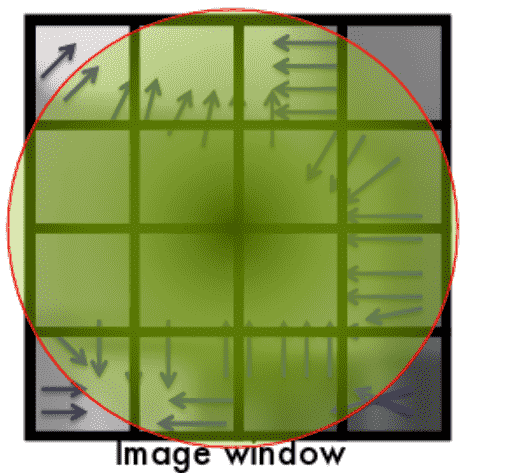
我们把[0,2π]分成若干份,对所有方向进行计数
数量最多的即为主方向
那么只需要按照主方向的角度进行旋转即可
打包后得到的向量即为描述符
显然
- 强度:DoG的归一化、梯度足够处理
- 姿势:按照主方向把所有箭头旋转成一样的角度,无视了姿势变化
- 尺度:DoG处理完毕
- 类内变异:直方图有一定的粗略计算,有一定鲁棒性
L11. Visual recognition
数学补坑
SVD分解(未完成)
卷积
【官方双语】那么……什么是卷积?
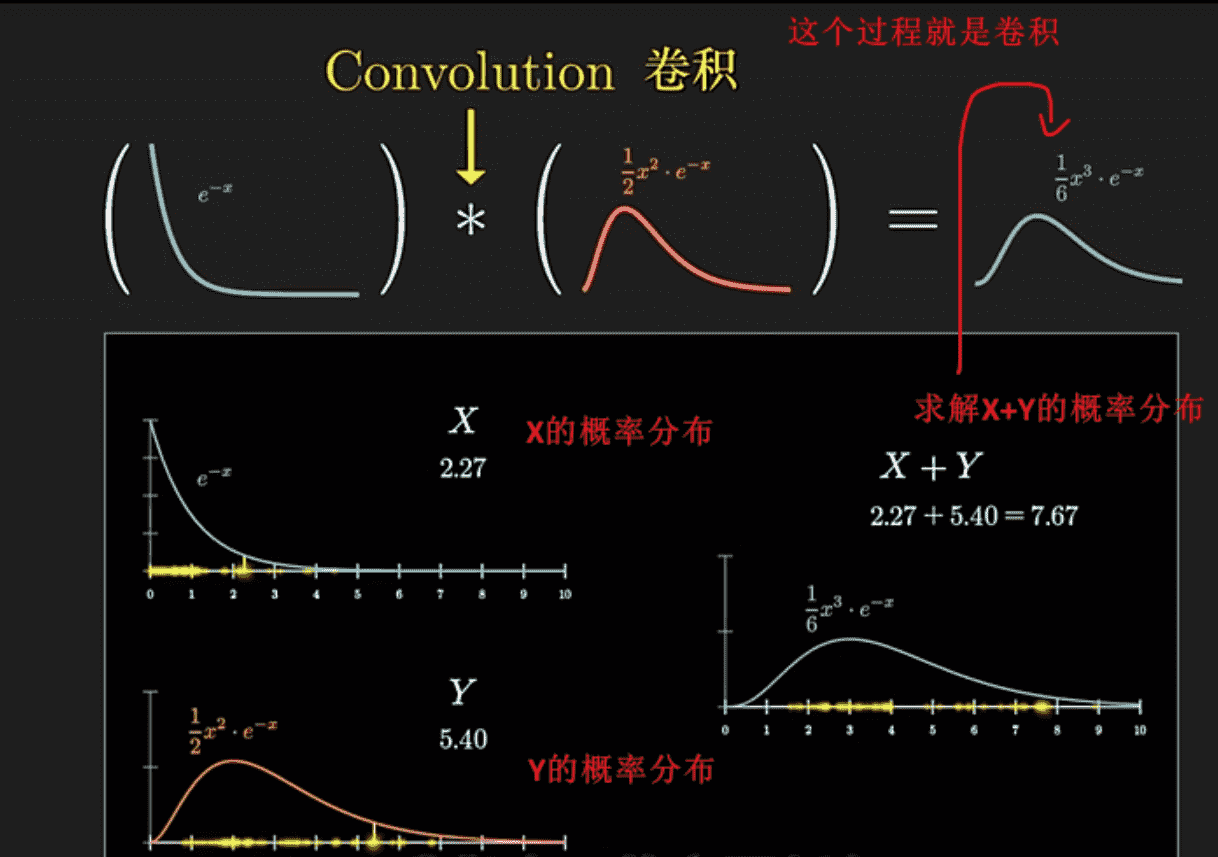
在这里我们主要理解一下离散的情况即可
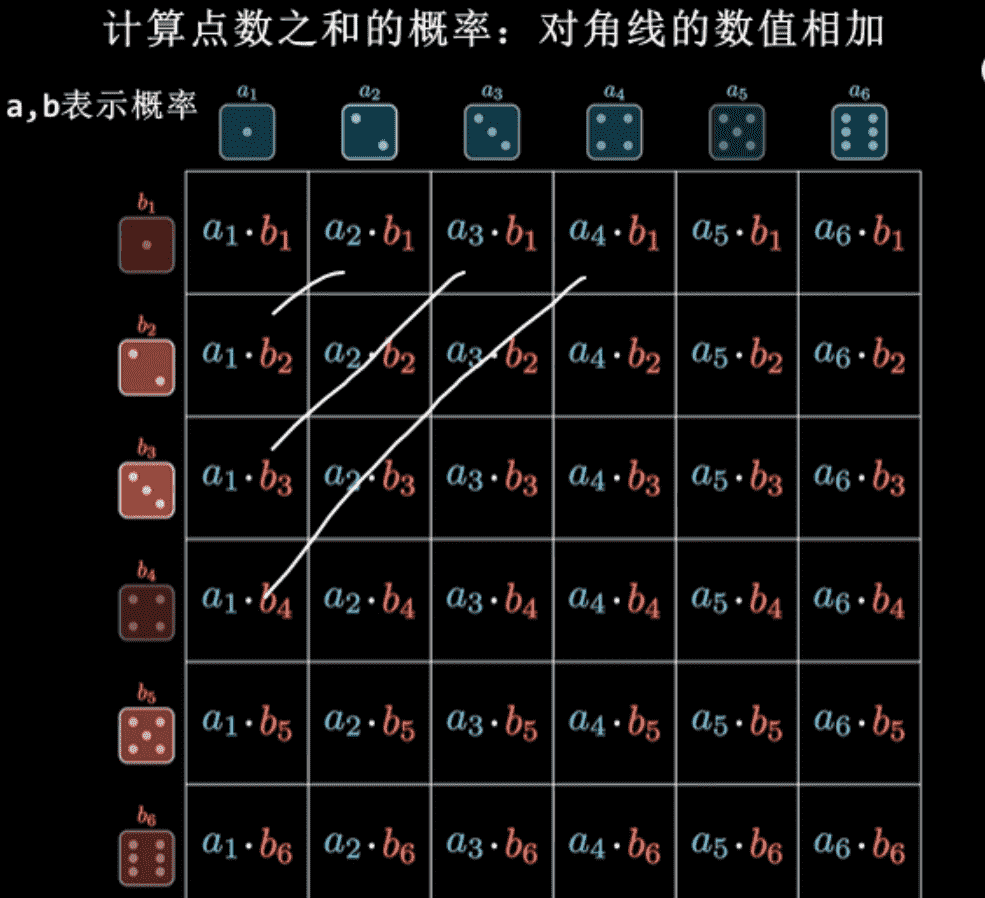
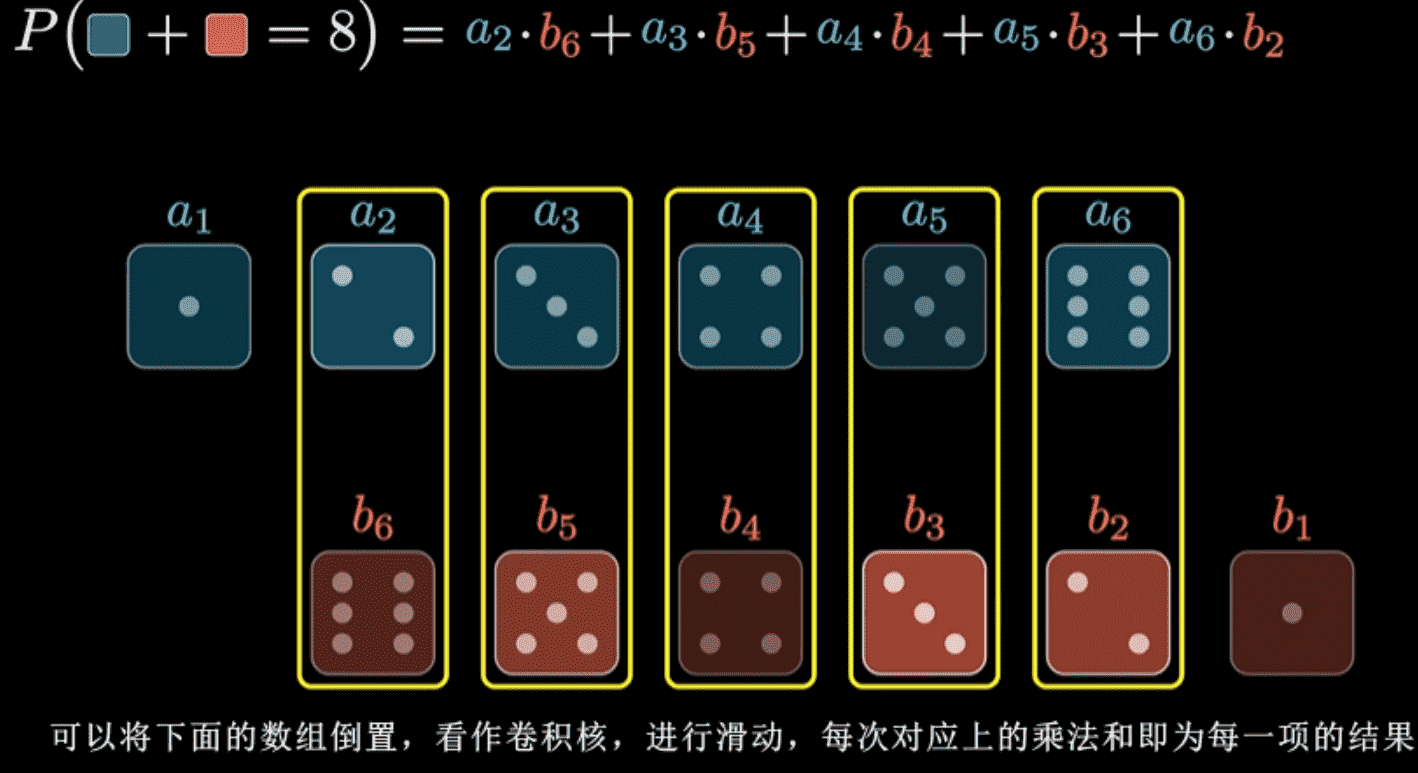
因此我们可以表示两个非均匀骰子点数之和为n的概率P(n)
P(n)=i+j=n∑aibj
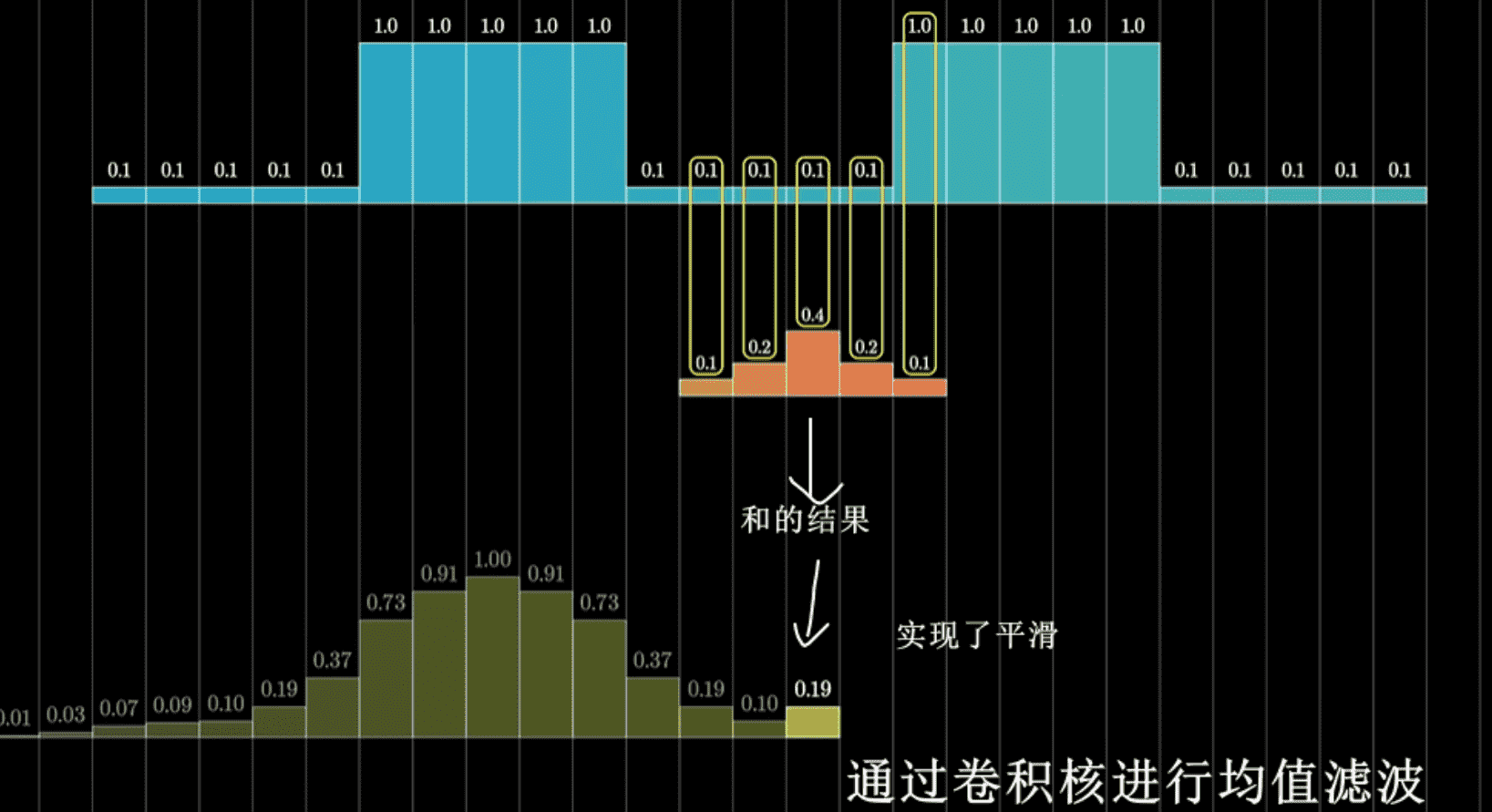
高斯模糊:
在二维图像上,使用一个n×n的卷积核,卷积核的值从中心开始符合二维高斯分布,对整个图像的颜色进行加权平均
