
L3. Image as input
原则
局部性
- 图片的识别往往需要注意一小块的特征

-
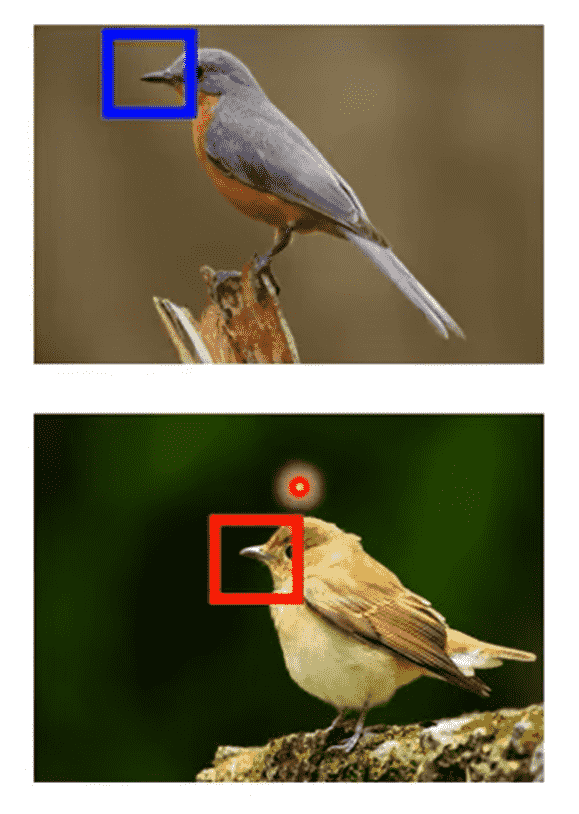
就算是人类也会根据局部特征,被误导进行分类(其实这是一只猫而不是一只鸟)
-
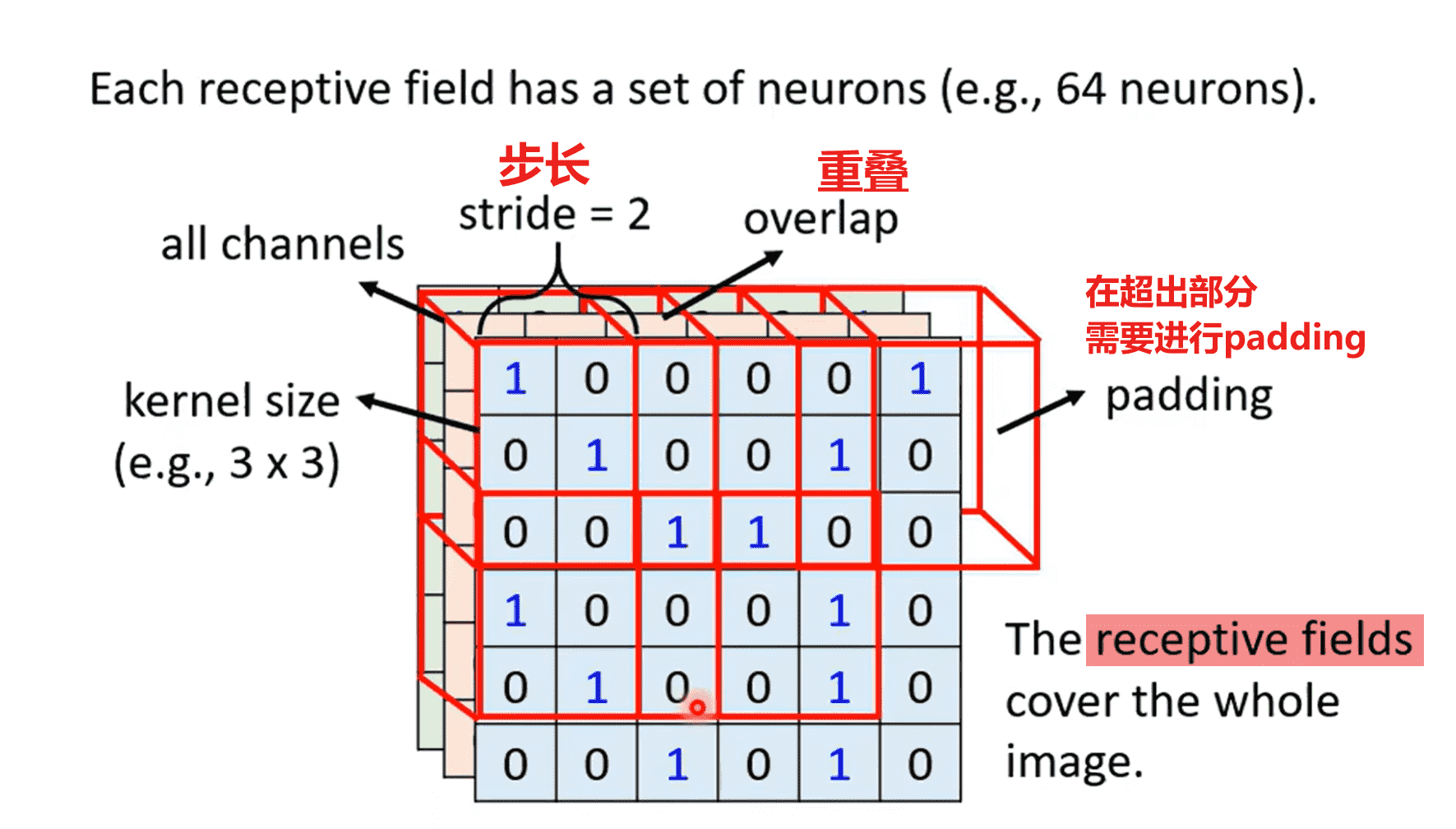
图像会被切分成多个感受野,感受野之间需要有所重叠(否则会遗失边界上的信息)
-
因此我们需要用感受野覆盖整个图像
-
用一组神经元,识别同一个感受野,即负责这一块区域的图像识别
平移不变性
- 同一个特征可以出现在不同的位置,因此理论上识别同一个特征的单元应该有相同的参数
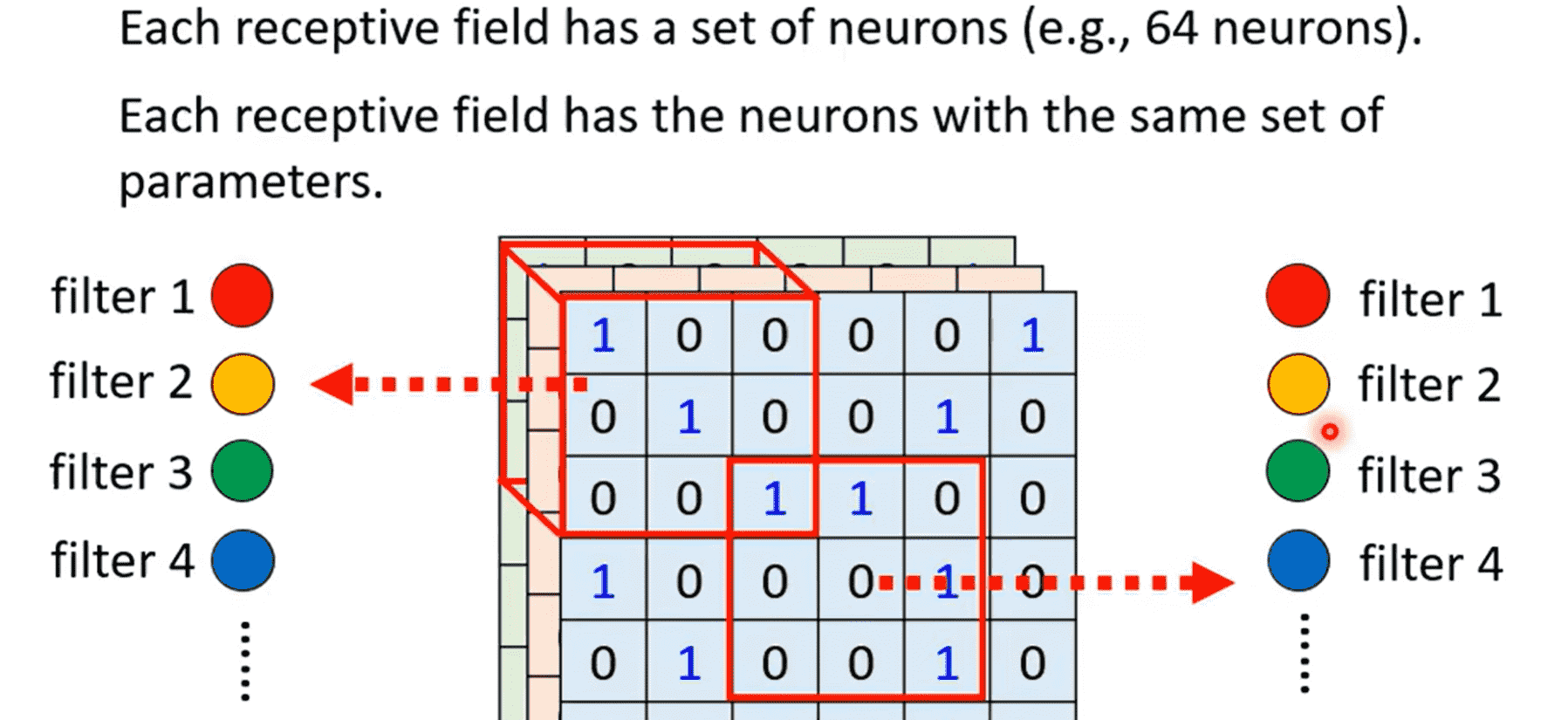
- 对于同一个感受野,它应该携带多个神经元,即多个识别单元filter,以识别不同的特征
- 不同感受野的同一个filter,需要共享参数
卷积神经网络
卷积层
我们从一般的全连接神经网络出发,引入了两个限制
- 一组神经元只会接受图片上一块区域的张量(感受野)
- 断掉了这些神经元与其他位置的连接
- 不同组神经元的同一类识别单元需要共享参数
此时我们相当于对MLP大砍一刀,变成了一个限制非常大的神经网络,即卷积层
- 但实际实现我们其实对于一个filter,就是一个卷积核,直接让它扫一遍整个图像即可
一个卷积核会产生一个新的通道
-
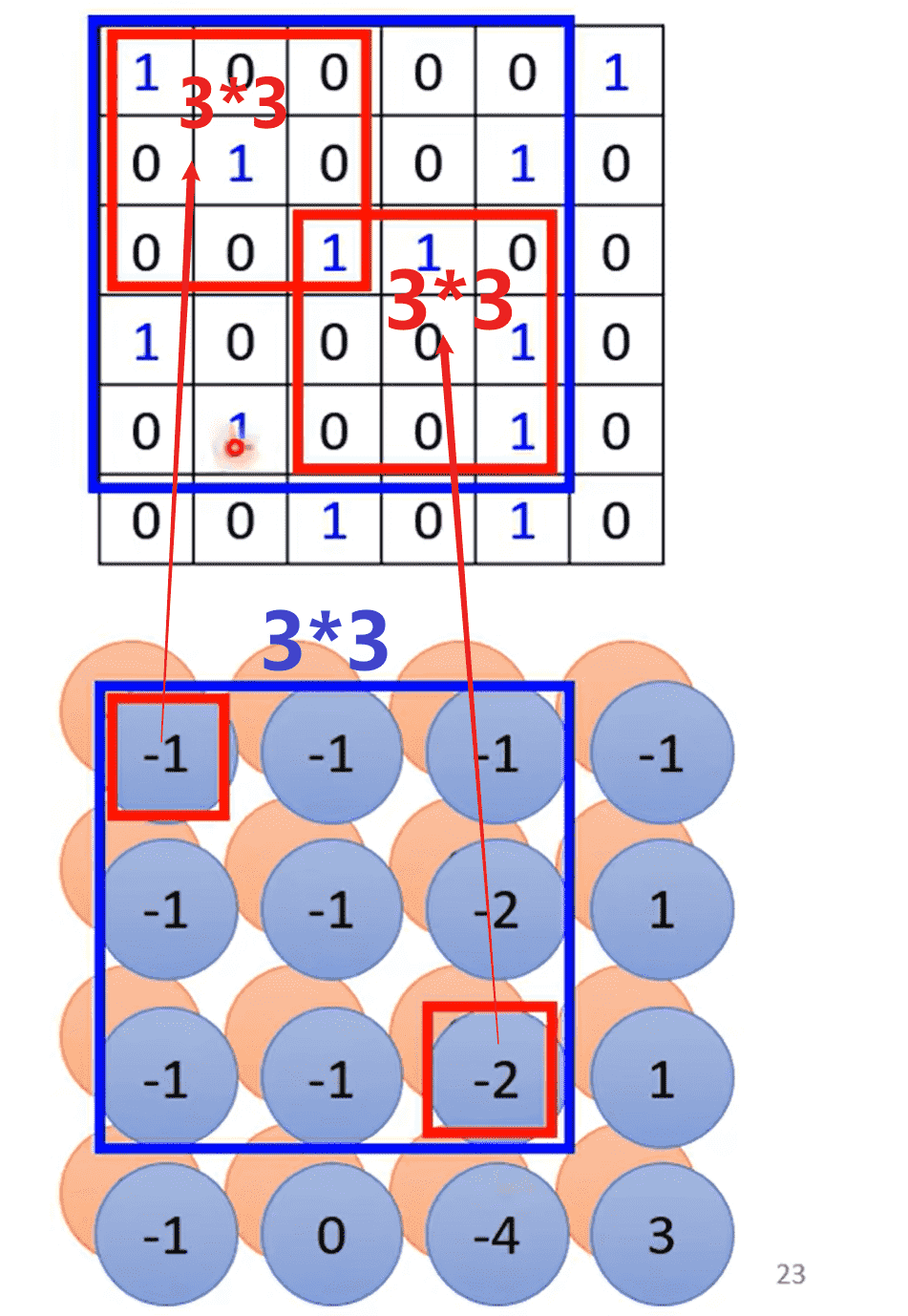
如图,同样一个3*3的卷积核,恢复到原图像中,会对应上超过9个以上的像素
-
随着深度增加,一个卷积核的真实感受野也会变大
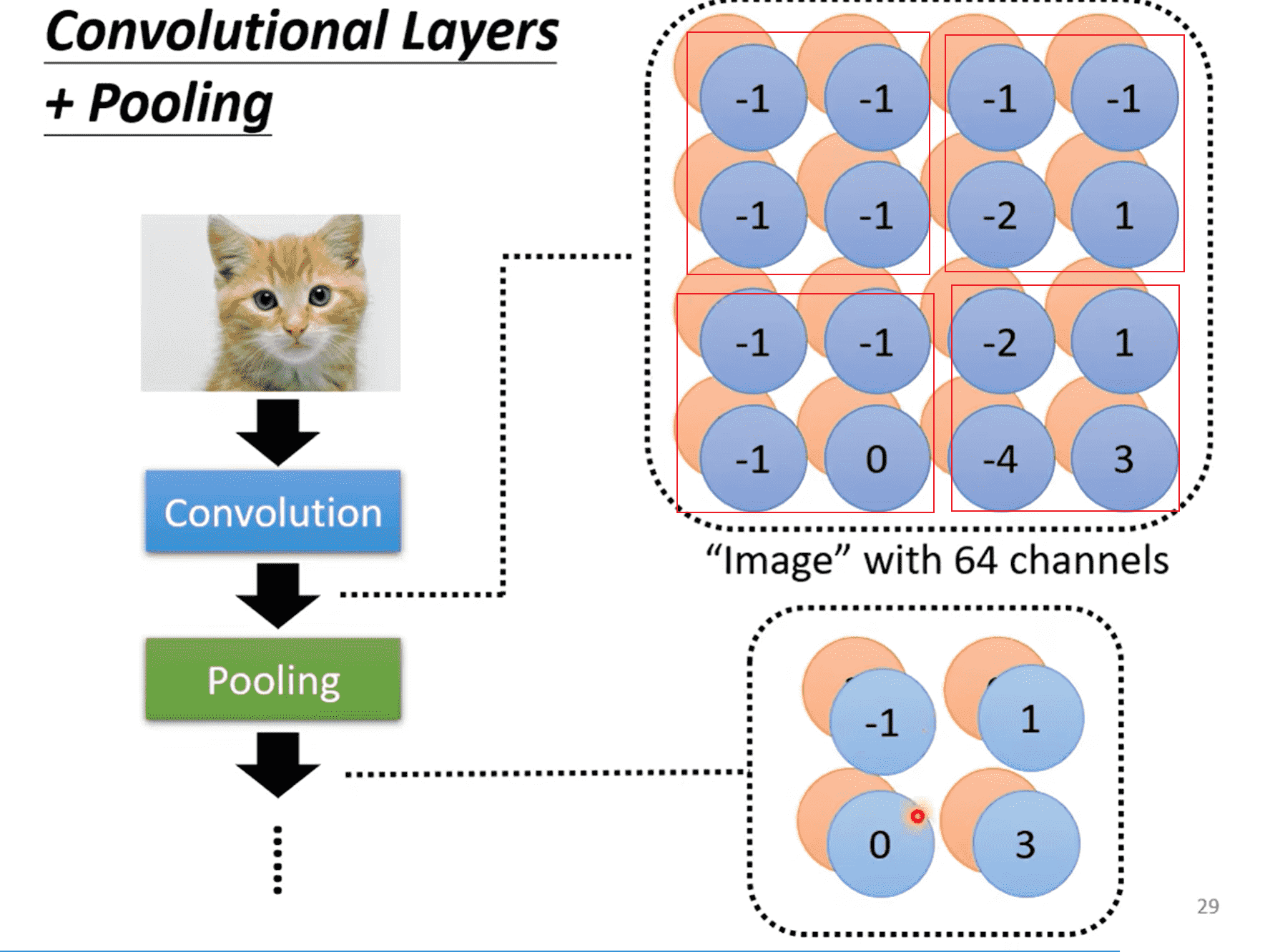
池化层
-
大量的卷积核,产生大量的通道,因此对于原图像的尺寸来说参数会非常多
-
我们考虑通过池化缩减原图像尺寸(通道数不变)
-
Max、Mean Pooling
在计算量足够的时候,不一定需要使用Pooling(会丢失很多信息)
数据增强
旋转、缩放图像,可能会使得CNN变得很差
所以推荐在训练前使用数据增强
Spatial Transformer Layer
但我们为什么不直接在网络结构中加一个层呢
详细解读Spatial Transformer Networks(STN)-一篇文章让你完全理解STN了-CSDN博客
没学太明白,知道个大概