[TOC]
https://www.bilibili.com/video/BV1sd4y167NS
Value Iteration
基于BOE:
$$ v = f(v) = \max_\pi(r_\pi+\gamma P_\pi v) $$我们不断做迭代:
$$ v_{k+1} = f(v_k), k=1,2,3,... $$这个就是value iteration
整个算法可以拆成以下步骤:
- Step1:Policy Update
基于上一步的state value,找出当前最优的策略
- Step2:Value Update
基于该策略,更新所有的state value
理论上$v_k$不能被称为state value
由于所有的state都是在优化过程,因此不能保证所有state都符合贝尔曼公式
因此只是一个临时状态
从代码实现的角度:
- Step0:若$\left| v_k - v_{k-1}\right | > \text{eps}$
- 否则结束,说明收敛
- 对所有的state,计算出所有的$q(s,a)$
- 得到$a^*_k(s,a) = \arg \max_a q_k(s,a)$
- Step1:
这是一个贪心的策略
- Step2:
Value Iteration从当前的state value出发,决定了下一个Policy
使用新的Policy去更新state value
Policy Iteration
与之相比,还有一种迭代方式是以Policy作为基础
与Value Iteration不同,我们的出发点是一个初始策略$\pi_0$
进行如下迭代:
- Step1:Policy Evaluation
- 计算基于当前策略$\pi_k$的state value
这里的求解依赖于一个迭代的过程
因此整个Policy Iteration,内含一个小的迭代
- Step2:Policy Improvement
- 基于当前state value,找出最优策略
从代码实现的角度
- Step1:$v_{\pi_k}$基于策略$\pi_k$不断迭代,直到$v_{\pi_k}$收敛
- Step2:基于$v_{\pi_k}$算出所有的$q_{\pi_k}$
- 得到$a^*_k(s,a) = \arg \max_a q_k(s,a)$
- 同样做以下事情:
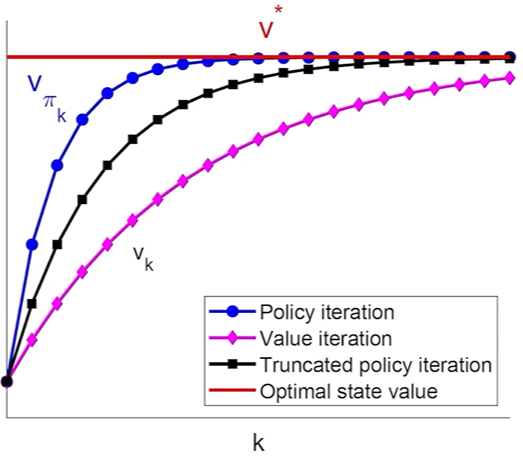
策略迭代会出现一个现象:接近终点的策略会先变好
因为一开始都是乱七八糟的,接近终点的策略会更先找到方向
Truncated Policy Iteration
- policy:基于$\pi$进行policy evaluation,得到$v_\pi$,再policy improvement得到新的$\pi$
- value:基于$v$做policy update更新得到当前最优$\pi$,根据$\pi$做value update得到新的$v$
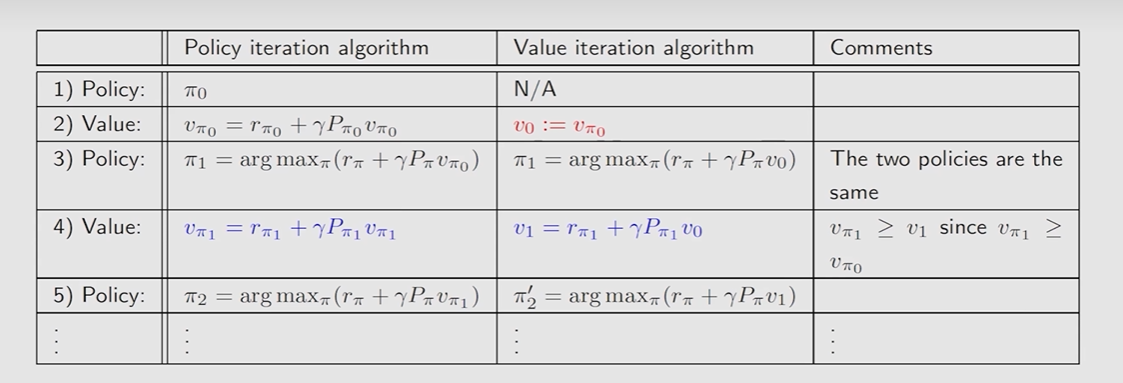
对两个算法进行对齐
前面说了:Policy Iteration是一个大的迭代包含一个小的迭代过程
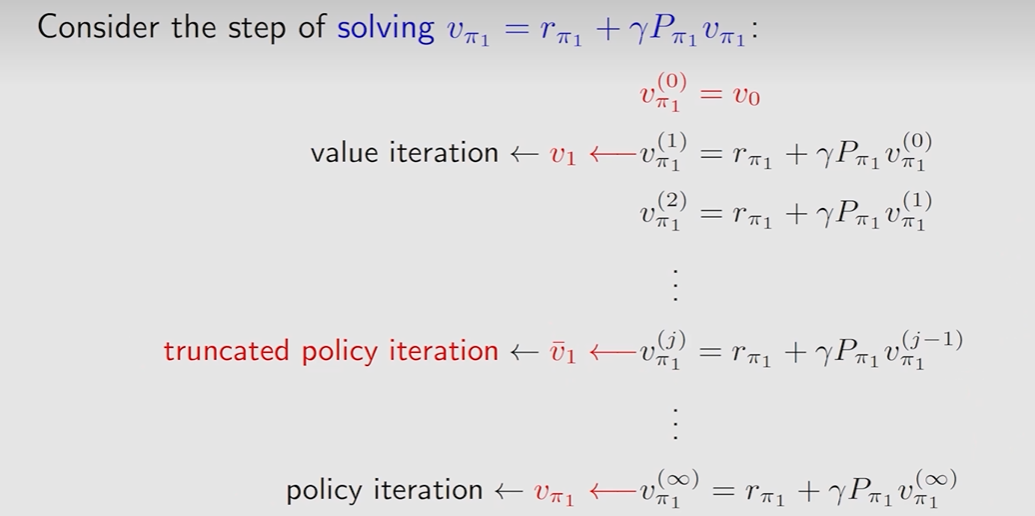
而value iteration的第一次迭代得到的$v_1$,事实上就是Policy iteration小迭代中的第一个中间量
我们显然不会在这里进行无穷次的迭代
所以这个迭代次数就可以一般化成Truncated Policy Iteration(截断策略迭代)
当迭代次数为:
- 1次:value iteration
- 无穷次:policy iteration(因此这个算法不存在)
所以Truncated Policy Iteration是两个算法的一般化形式